-
 モーションコントロール
モーションコントロール
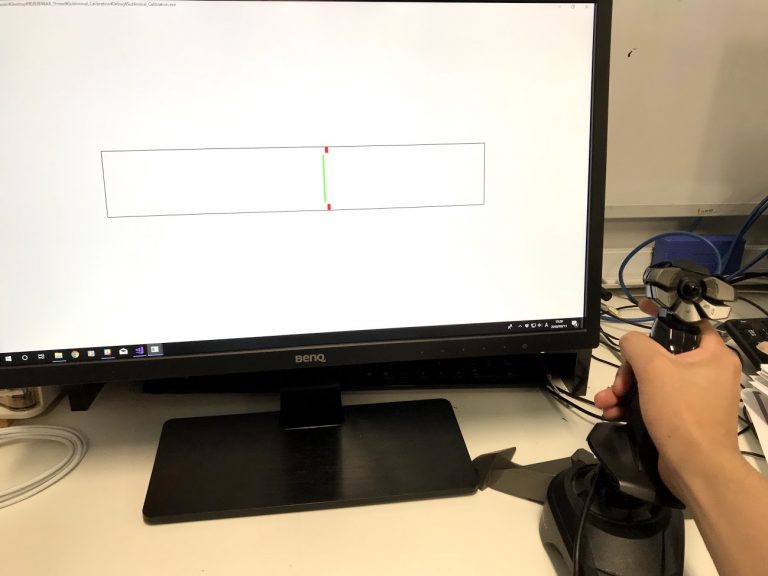
サブリミナルキャリブレーションによる汎用デバイス操作技術獲得支援
機械操作熟達の手法として,人間の無意識下での学習能力に着目したサブリミナルキャリブレーションが提案されている.この理論は,人間が予測するダイナミクスに実際のダイナミクスが近づくように調節を行うことで人間の無意識下の学習を […]-
 crlweb
crlweb
-
-
モーションコントロール
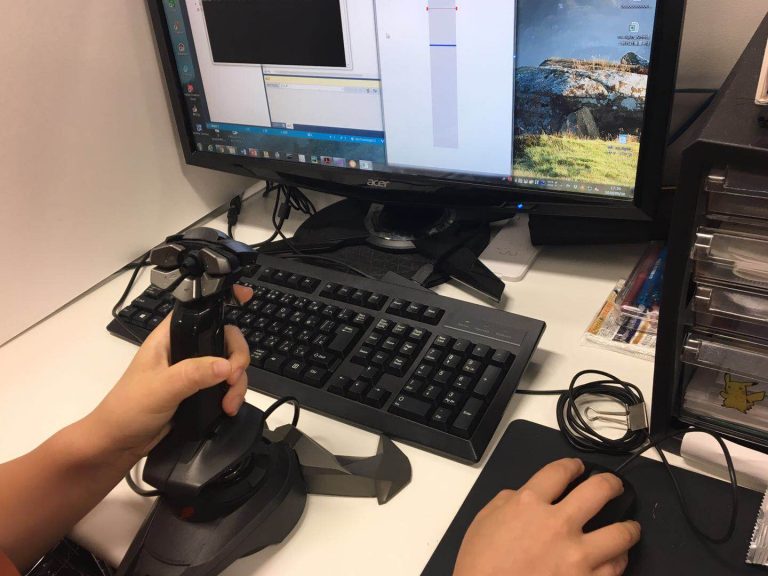
ダイナミクスを変化させることによるインタフェースの設計
近年,安全性を向上させるだけではなく,運転の容易さ,快適性を高めるための各種運転支援システムの導入が進んでいます.しかし,自動車を運転するドライバーはスキル,嗜好,癖など様々な特性を持っているため,個々の操作特性に合った […]-
crlweb
-
-
 モーションコントロール
モーションコントロール
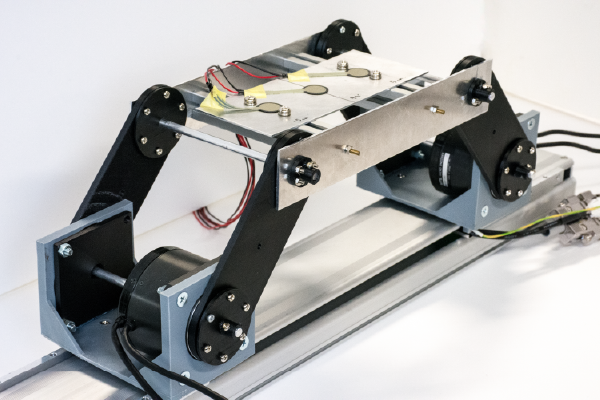
リニアアクチュエータを用いたせん断力測定およびフィードバック機構の開発
現在,日本では少子高齢化が悪化の一途をたどっており.2014年には26%である65 歳以上の高齢者人口が,2060 年には約40% まで上昇する見込みです.それに伴い介護人口も上昇することが予測されます.また,現時点で介 […]-
crlweb
-
-
 活動報告
活動報告
LIFE2018に参加
M2の宮元さんが早稲田大学 西早稲田キャンパスで行われたLIFE 2018にて発表を行いました. 発表内容 宮元 大地さん介護の⾃動化に向けた⼒測定およびフィードバック機構の開発-
crladmin
-
-
活動報告
ヒューマンインタフェース学会 ヒューマンインターフェスシンポジウム2018に参加
M2の芦森さんが筑波大学で開催されたヒューマンインタフェース学会 ヒューマンインターフェスシンポジウム2018にて発表を行いました. 発表内容 芦森 和茂さん相補的学習支援システムにおけるグローブ型デバイスの開発-
crladmin
-
-
活動報告
第23回 知能メカトロニクスワークショップに参加
M2の宮元, M1の佐々木さんが沖縄工業高等専門学校で開催された第23回 知能メカトロニクスワークショップにて発表を行いました. 発表内容 宮元 大地さんフォースフィードバックを用いたセンサレス圧力測定デバイスの開発佐々 […]-
crladmin
-
-
活動報告
2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronicsに参加
オークランド工科大学(オークランド/ニュージーランド)で開催されたAIM2018にて研究発表を行いました. 発表内容 Daichi MiyamotoDevelopment of Shear Force Measureme […]-
crladmin
-
-
活動報告
日本機械学会 ロボティクス・メカトロニクス 講演会 2018 in Kitakyushuに参加
本研究室の学生らが北九州国際コンベンションセンターで行われたロボティクス・メカトロニクス講演会2018にて6件の研究発表を行いました. 発表内容 吉田 琢人さん振動刺激による操作支援に向けた入力インタフェースの開発宮元 […]-
crladmin
-