-
 人間機械システム
人間機械システム
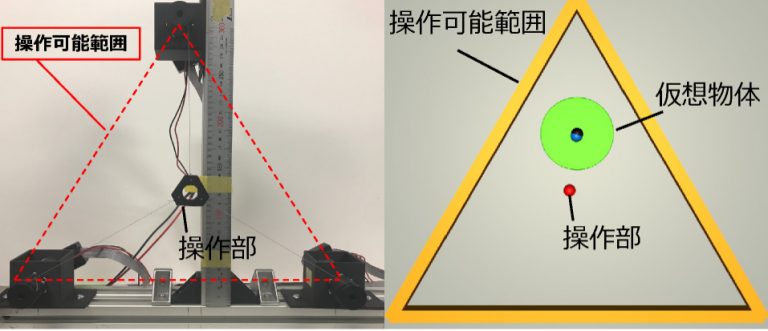
ハプティックインタフェースによるバーチャルペットロボットの構築
実空間における動物型ロボットは関節や表情を増やすと、重量や大きさが増えてしまいます。その結果、動物らしさを表現することが出来ず、すぐに飽きられてしまいます。そこで本研究では,バーチャル上でペットロボットを構築することをに […]-
 crlweb
crlweb
-
-
 モーションコントロール
モーションコントロール
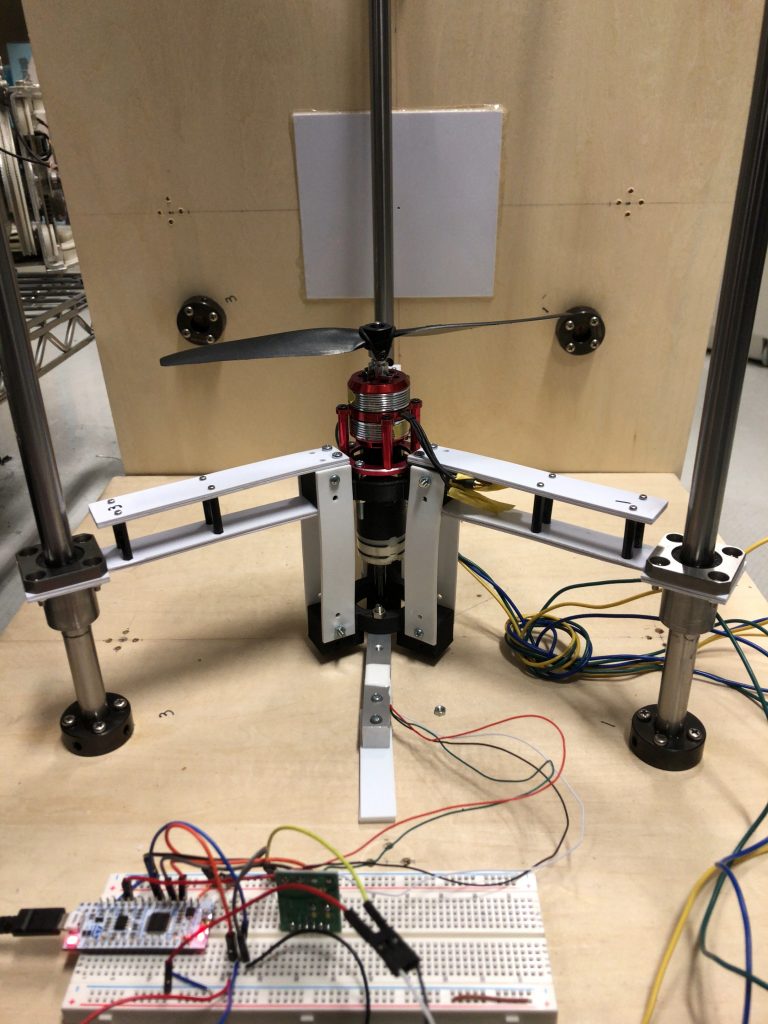
二重反転プロペラを用いた天井吸着ドローン
近年、ドローン市場の成長は著しく、災害現場での状況確認や橋脚など高所の構造物点検に用いられており、その活躍現場は多岐にわたっています。ドローンを活用するうえでの最大の利点は高所作業等、人が立ち入る際にリスクが伴う現場での […]-
crlweb
-
-
 モーションコントロール
モーションコントロール
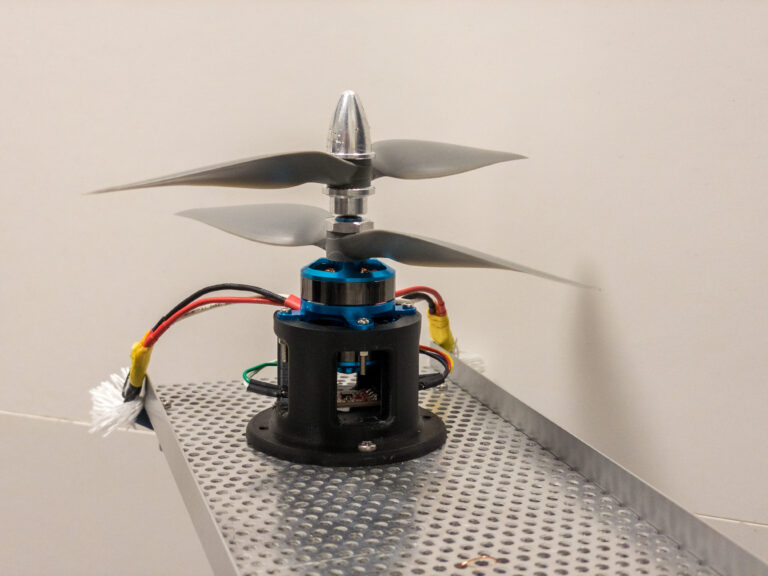
複数のCoaxial-UAVによる協調搬送に向けた姿勢制御
UAVは様々な場面で活用されており,荷物搬送に利用することで既存の搬送手段の代替とすることが期待されています.これまでのUAVによる搬送では,搬送可能な重量に制限があります.そのため,複数機を用いた搬送について研究が行わ […]-
crlweb
-
-
 活動報告
活動報告
電気学会 電子・情報・システム部門大会に参加
M2の佐々木さんとM1の小泉さんが電気学会 電子・情報・システム部門大会にて口頭発表を行いました. 発表内容 ・佐々木さん「気づかい」による力のインタラクションを伴う集団技能アシスト ・小泉さん利き手を規範とした非利き手 […]-
crlweb
-
-
活動報告
ヒューマンインタフェース学会 ヒューマンインターフェスシンポジウム2019に参加
M1の山崎さんが京都府で開催されたヒューマンインタフェース学会 ヒューマンインターフェスシンポジウム2019にて口頭発表を行いました. 発表内容 山崎 友輔さんサブリミナルキャリブレーションによる力覚提示を用いた熟達支援-
crladmin
-
-
活動報告
電気学会 2019年産業応用部門大会に参加
五十嵐教授が長崎県で開催された電気学会 2019年産業応用部門大会にて口頭発表を行いました. 発表内容 五十嵐 洋教授人工知能技術を応用した機械操作熟達支援 -Time-Shifted Auto-Encoder による長 […]-
crladmin
-
-
活動報告
日本機械学会ロボティクス・メカトロニクス講演会’19に参加
本研究室の学生らが広島県で開催された日本機械学会ロボティクス・メカトロニクス講演会’19にてポスター発表を行いました. 発表内容 内田 優さん上腕への振動刺激による運動錯覚時の上肢運動特性解析中村 叶弥さんモチベーション […]-
crladmin
-
-
活動報告
SAMCON2019に参加
本研究室の学生らが千葉大学 西千葉キャンパスで開催されたSAMCON2019にて研究発表を行いました. 発表内容 K. AshimoriAnalysis of Individual Joint Controllable […]-
crladmin
-
-
活動報告
2nd International Conference on Intelligent Human Systems Integration (IHSI 2019)に参加
本研究室の学生らがサンディエゴで行われたIHSI2019にて研究発表を行いました. 発表内容 K. AshimoriDevelopment of an Individual Joint Controllable Hapt […]-
crladmin
-