オンラインショッピングや製品開発において,視覚情報だけでなく触覚情報も利用されると予測されています.この利用用途は触覚探索と呼ばれ,製品のテクスチャが重視される場合に活躍します.この触覚探索においては,ユーザが用意されたテクスチャをいくつも触って選択するようなシステムよりもユーザ自身が粗さや硬さを調整可能なシステムが望まれます.例えば既存の3Dモデリングソフトにおいてもテクスチャを貼り付けた後,フィルタなどをかけることで粗さの調整を行います.しかし,一般的な触覚モデリング手法は調整が効きません.
最も多くの研究で使用されている手法の一つにデータ駆動型と呼ばれる手法があります.これは実際に物体表面をなぞることで振動を測定し,この振動をテクスチャの触覚として再現する方法です.この場合,測定したものをそのまま使用するのではなく高次元のIIRフィルタを用いて振動の周波数特性を近似します.近似を行う理由は振動が物体表面をなぞる速度や力によって変化するためです.このIIRフィルタによる近似手法では力と速度の2軸ルックアップテーブル(LUT)にフィルタの伝達関数を格納していました.つまり,再現するテクスチャごとにこのLUTを生成する必要がありました.
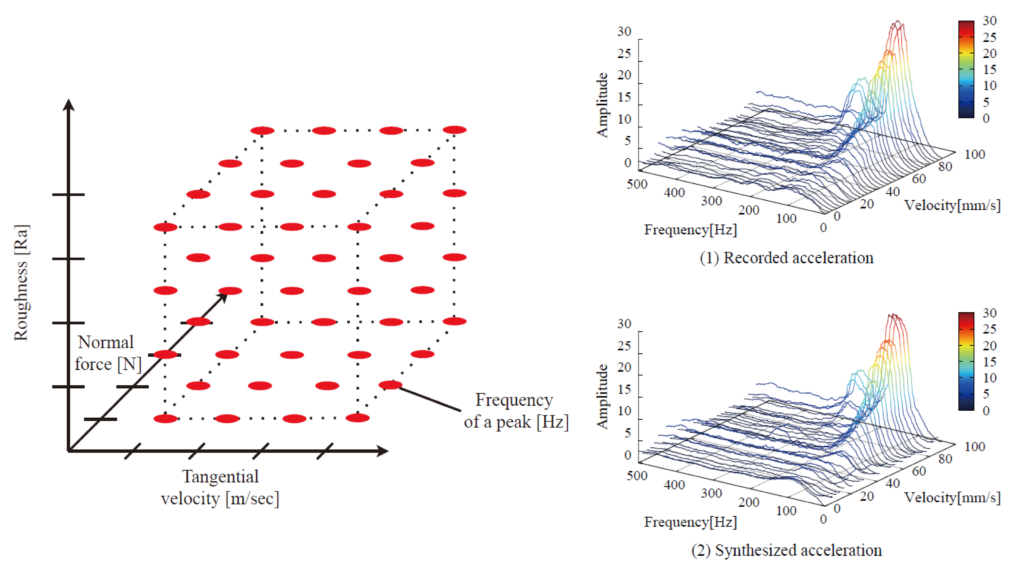
そこで,本研究では高次元IIRフィルタではなく低次元のIIRフィルタで構成したパラメトリックイコライザ(PEQ)を用います.パラメトリックイコライザの特性を決めるパラメータはピークの数,基本周波数,ゲイン,帯域幅のみです.つまり,各パラメータに対してLUTを使うことなく近似式での再現が可能です.これにより,力や速度だけでなくテクスチャの物性に対する応答も近似が可能であり,本研究では多次元最小二乗法によってこれを実現します.現状ではPEQとOptunaによる自動振動合成システムが完成し,再現精度は従来手法と同等のものを得ています.更に速度軸に関して最小二乗法を適用して被,験者に再現度を評価させた実験では良好な反応をいくつかのテクスチャで得ています.