一般的に、「近い将来ロボットが一家に1台導入される」と言われて久しいが、人とロボットが協調し共存できる社会は親和性の極めて高いロボット開発の成否にかかっています。
現在、さまざまな全方向移動用ホイールが開発・利用されています。特に、メカナムホイールは耐久性が非常に高いことから、高負荷がかかる運搬ロボットでよく用いられています。しかしながら、屋外において、メカナムホイールを用いた場合は、通常のホイールの様に地面との接触が連続的ではなく、断続的に接触してしまうこととなります。これが原因で路面状況に関係なく振動が発生してしまい、荷物を搭載したロボットや車椅子の乗り心地が悪化し、さらに、荷崩れよる作業効率低下の要因となっています。
そこで本研究では、リニアアクチュエータにより、車輪にかかる外乱を軽減する制御を行うことで、安定した移動が実現できると考えています。従って、現在、工場や倉庫の構内物流の現場ではピッチング振動を軽減することにより、乗り心地や物流効率の改善に貢献することを目指しています。
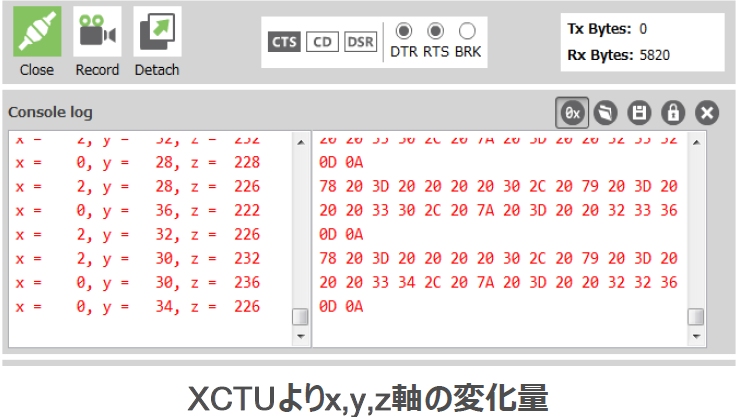
また、全方向移動ロボットの取り回しを向上させるために、ZigBeeを用いることによって加速度センサを無線化する方法を提案します。ZigBeeとは、センサネットワークを主目的とする近距離無線通信規格の1つです。これによって、車輪周辺に装着する加速度センサの変換量をネットワーク上で確認でき、無線でデータの読み取りが可能となります。
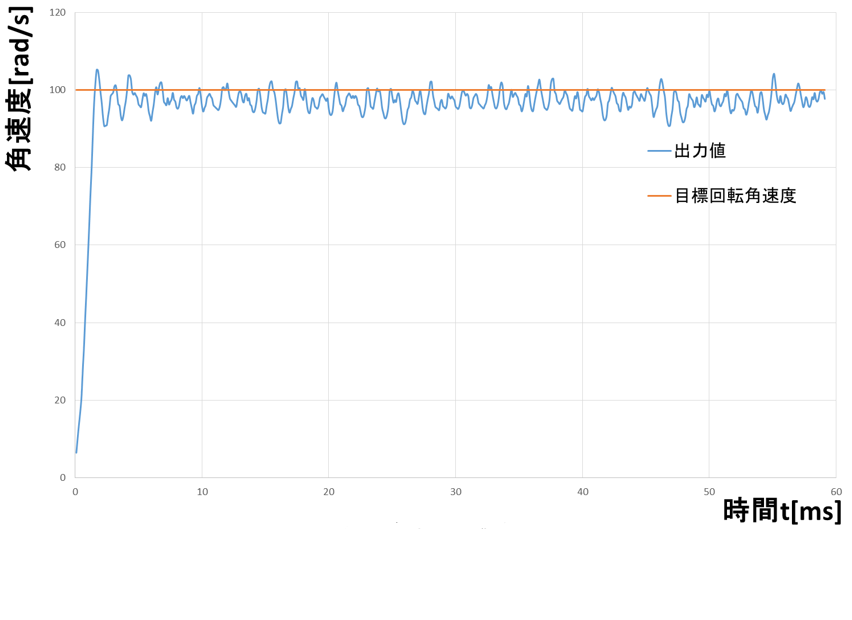
現在、試作機を開発し、メカナムホイールを定速に動かすために、ポロルモータを用いたモータの速度制御が行いました。また、ZigBeeを用いた加速度センサの無線化も成功しました。
Development of Vibration Reduction Mechanism for Omnidirectional Carrier Robot
-
Author
 crlweb
crlweb