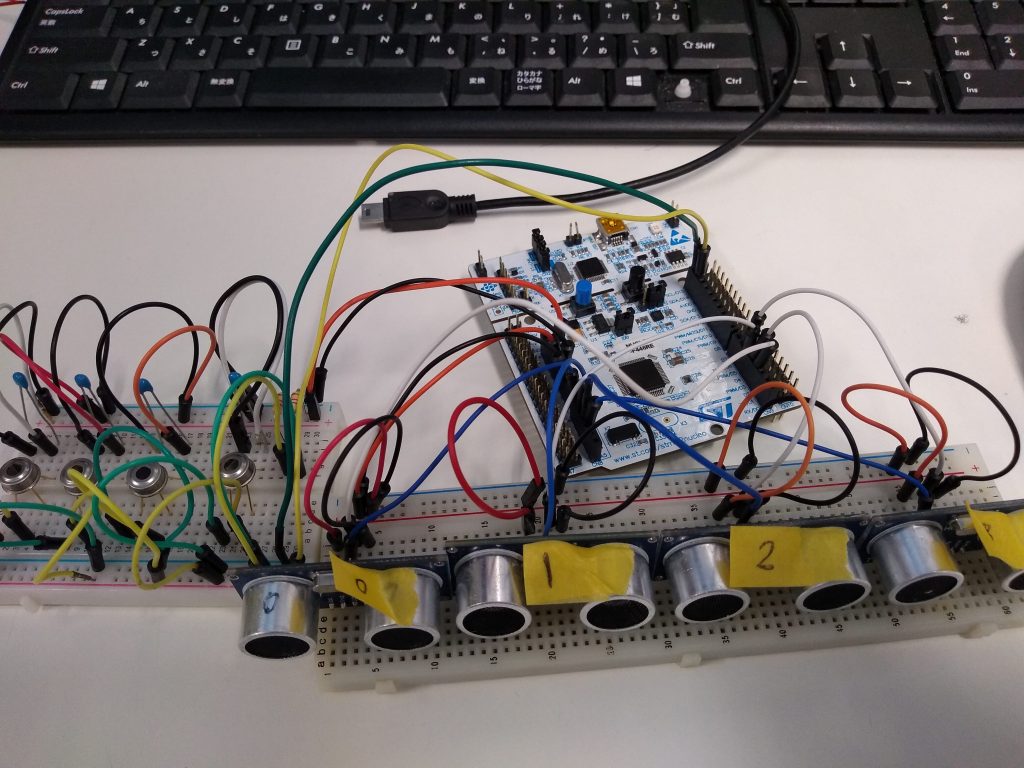
レーザスキャナは精密な距離情報を取得することができるため,自動運転だけでなくレスキューロボットの“目”としても利用されている.しかし,レーザスキャナは機材が高価であることや距離情報以外の取得が困難であるという問題がある.本研究は,センサの回転によって3次元空間での測定を可能とし,距離情報に加えて温度情報を取り入れた近距離多層化マップの生成を提案する.温度情報を加えることによって物体判別の精度が高まると考えられる.図は距離によって変化する温度センサの値を超音波センサと併用することで温度のばらつきを補正したグラフである.結果から距離に対応した温度センサの値が得られた.今後,2種類以上のセンサの回転によって得られた3次元空間の値をマッピングするソフトを開発する.