近年,ニューラルネットワークを用いた研究が盛んに行われている.ニューラルネットワークは学習の過程でたくさんのデータを用意する必要がある.
人の動きを学習する際には入力デバイスのコストの問題も今後考慮される.
そこで本研究はニューラルネットワークを用いる際のデータの用意と,入力デバイス作成のコストをへらすために学習結果を合成し、合成したデータで人の動きの予想ができるのか検討することである.
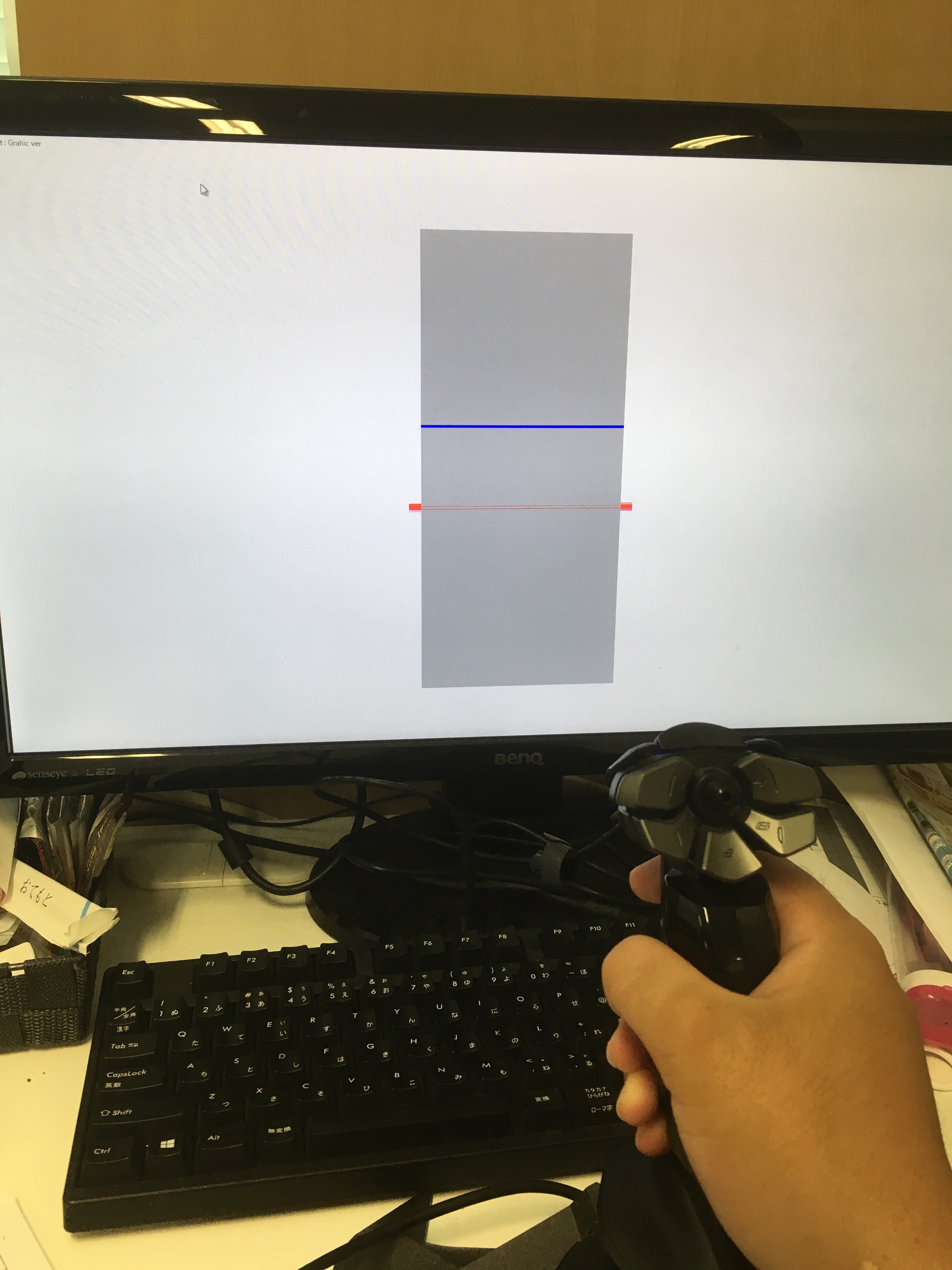
現在は,組み合わせる学習結果を作成するためにBarTrackingタスクの作成が完了した.
近年,ニューラルネットワークを用いた研究が盛んに行われている.ニューラルネットワークは学習の過程でたくさんのデータを用意する必要がある.
人の動きを学習する際には入力デバイスのコストの問題も今後考慮される.
そこで本研究はニューラルネットワークを用いる際のデータの用意と,入力デバイス作成のコストをへらすために学習結果を合成し、合成したデータで人の動きの予想ができるのか検討することである.
現在は,組み合わせる学習結果を作成するためにBarTrackingタスクの作成が完了した.