Information
協調ロボティクス研究室に興味を持っていただきありがとうございます.
このページでは,スケジュールと各研究の概要,YouTubeやZoom等のリンクが掲載されています.
学生による口頭発表・質疑応答はスケジュールに沿って開催され,各パートの開始時刻に同時スタートします.
また,教員による研究室説明がZoomによって行われます.
発表時間外でも,YouTube上で研究紹介を閲覧することが可能です.
他にも,研究室に関する相談や素朴な疑問などに答えるためのZoomも用意していますので,気軽にご参加ください.
Schedule
※9/2と9/3の発表内容は同一です
研究室紹介
協調ロボティクス研究室の紹介
9/2 13:30-14:00 | 9/3 10:00-10:30

五十嵐から研究室についての紹介を行います.
相談会
9/2 14:00-17:00 | 9/3 10:30-17:00

皆さんのお悩みに研究室の学生が答えます.
学部4年
9/2 14:00-14:30 | 9/3 10:30-11:00
筋疲労を考慮した
アダプティブパワーアシストスーツの開発
Xu Chang
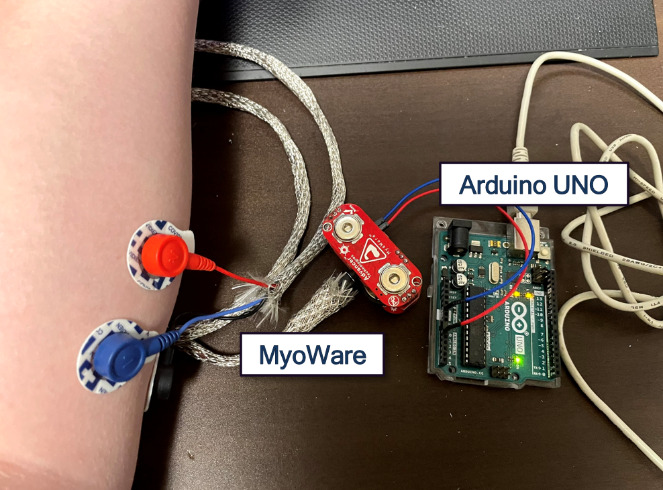
現在高齢者や体の不自由な人の生活を支援するパワーアシストスーツは多く開発されている.しかし現在開発されているパワーアシストスーツは動作が機械主体であり,人間自身が筋肉を動かしていない.そのため,使用者が動作に不快を感じてしまう場合が多々ある.
そこで本研究では使用者に不快を感じさせないために,筋疲労を考慮したパワーアシストスーツの開発を目的とする.提案手法では筋電センサを用いて筋電信号を測定して特徴量を抽出する.そして特徴量から運動意図推定と筋疲労測定を行う.運動意図の推定により上腕部の運動角度を動作目標とし,筋疲労の変化により出力を調整する.これにより,使用者に快適なアシストを行う.
恊働ロボットと人間の作業時における
操作支援システム
Taiga Kassai
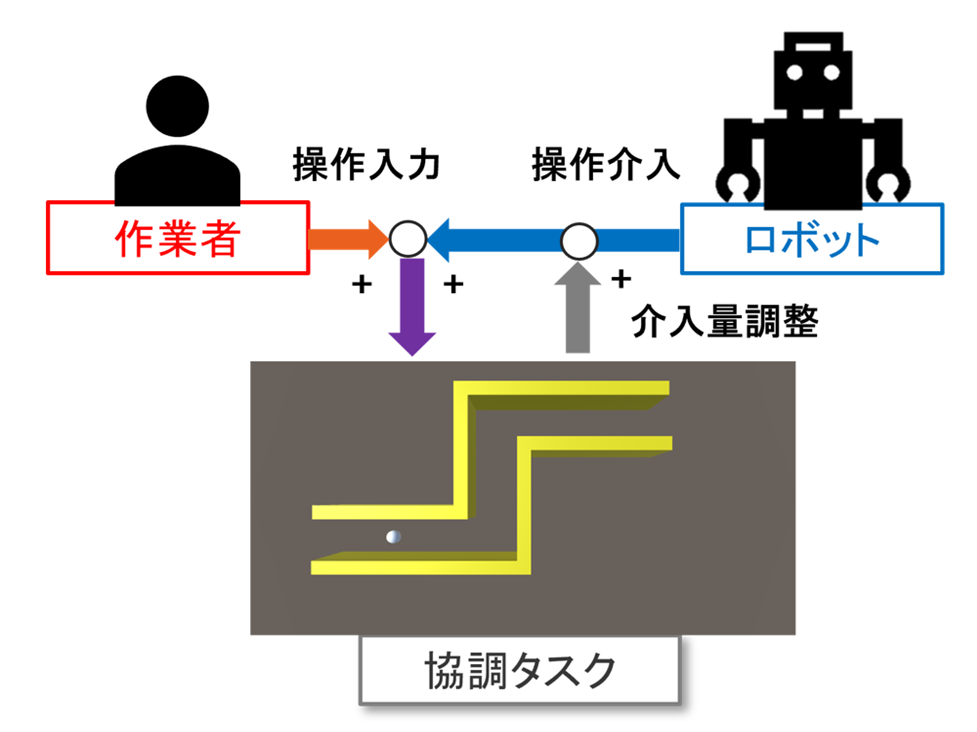
近年,支援ロボットの開発が盛んになっている.特に人と協働作業を行い,生産性や生活の利便性を向上するための「協働ロボット」が開発されている.既存の「協働ロボット」は予めどのような動作をするか設定されており,一緒に働いているヒトの個人特性については考慮されない.
そこで本研究では、個人特性に合わせて,ロボットからヒトへの操作支援を自動で決定するシステムを提案する.協調タスクにおけるヒトの入力量やタスク完了時間を評価・解析し,ロボットの協調タスクへの介入の有無及や介入量を調整する.
提案システムにより,ヒトが行いたい・ロボットに任せたい作業を予め設定する必要がなくなる.
9/2 14:30-15:00 | 9/3 11:00-11:30
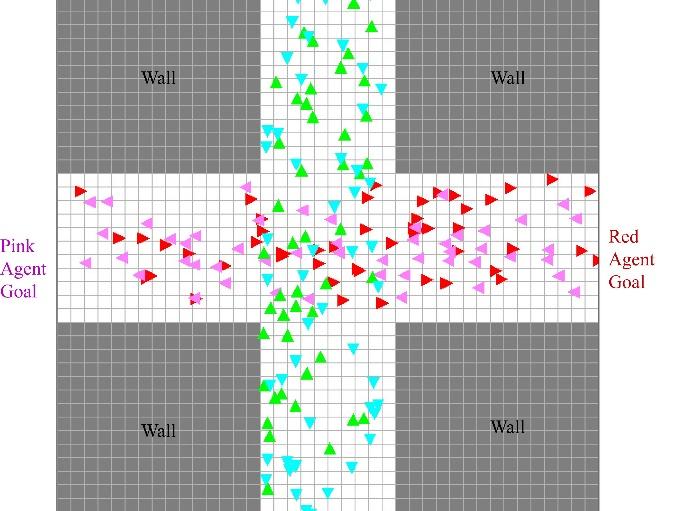
マルチエージェントによる性質の不確かな
目標物の誘導
Kotaro Kobayashi
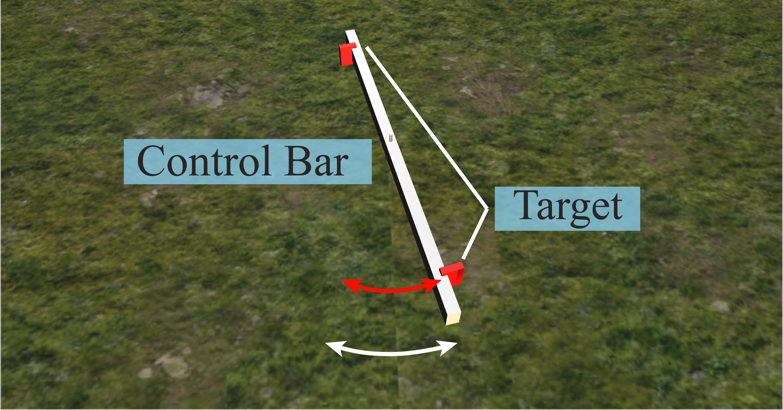
羊飼いの犬の動きから着想を得た誘導システムを牧羊犬システムという.既存の牧羊犬システムでは事前にターゲットの性質を細く設計する必要があり,未知の性質のターゲットを誘導することは出来ない.そこで本研究では牧羊犬システムに優れた個体の動作を真似する個性模倣を組み込む.これにより,あらゆる性質のターゲットを柔軟に誘導可能である.
現在は牧羊犬システムのBoidsモデルという制御式を作成している段階である.羊との斥力,目標地点の座標を定義しBoidsモデルに組み込み動作していることを確認できた.今後はさらにBoidsモデルに整列力と同種のエージェント間に働く斥力を追加し,エージェント数を変更したときの動きを確認する.その後多重人格アルゴリズムと個性模倣を導入する.
温度刺激を用いて覚醒維持を行う
運転支援インタフェース
Taiki Shike
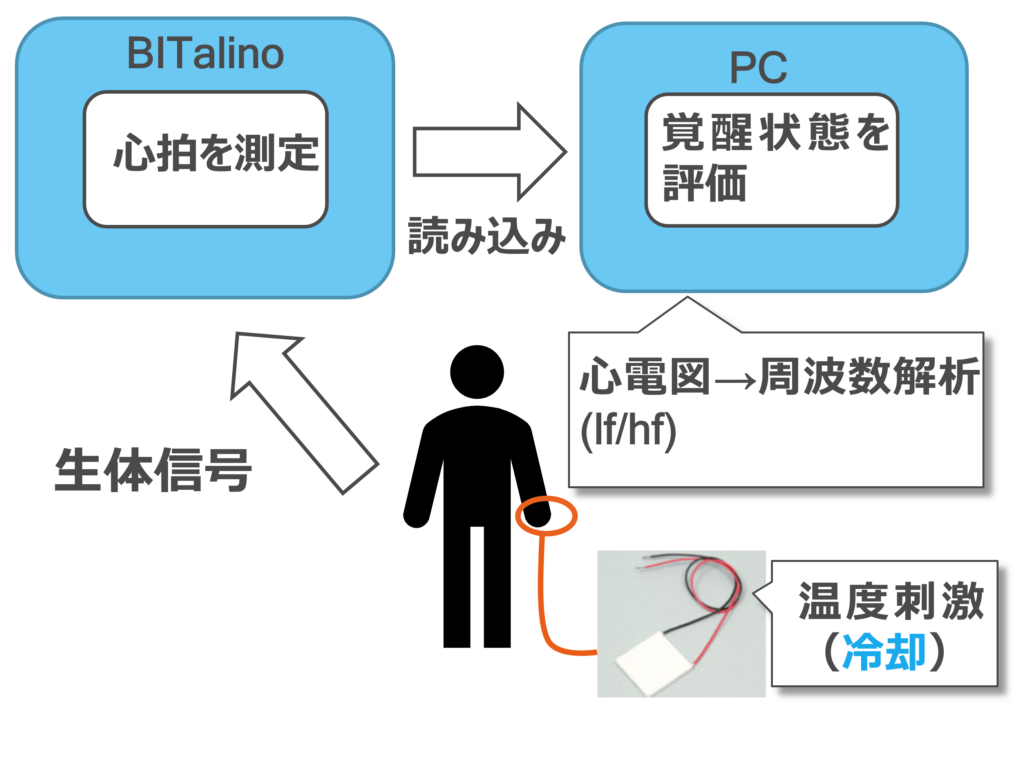
近年,自動化された運転環境下における運転者の覚醒状態の低下が懸念されている.運転復帰が要請された際に,眠気によって運転者が運転できないという課題がある.本研究では,運転中における覚醒状態の維持を可能とするインタフェースの開発を目指す.
提案手法では,心拍のゆらぎ(ECG)を用いて周波数解析を行い,HF(0.15~0.4Hz)成分の増減で覚醒状態の検知を行う.また,温度刺激(冷却)ができるペルチェ素子を用いたインタフェースによって覚醒状態の維持を行う.現在,心拍センサを用いて心電図の読み取りを行っている.今後は,運転タスクを作成し,筋電センサを用いてHF成分の周波数解析を行っていく.
9/2 15:00-15:30 | 9/3 11:30-12:00
感性値を用いたHuman Adaptive Air Unitによる
血行改善システム
Miharu Suga
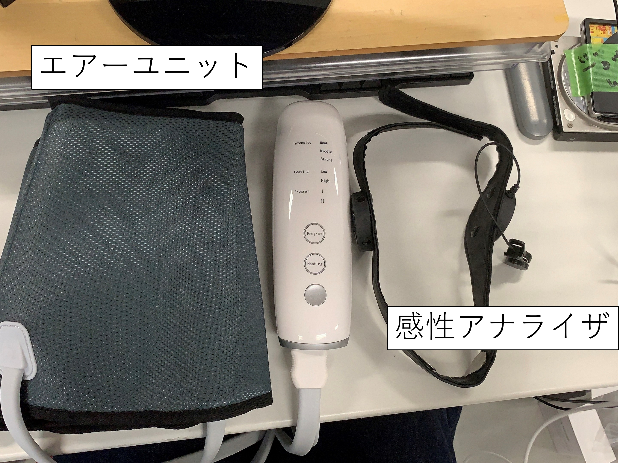
近年,新型コロナウイルスの影響でテレワークが推奨され,着座姿勢時間が増加した.長時間の着座姿勢は足部の血行悪化を引き起こし,エコノミークラス症候群や腰痛のみならず,脳梗塞や癌などにかかるリスクを増加させることがわかっている.血行を改善するデバイスは開発されているが,人が強弱やタイミングを調整する必要性がある.
そこで本研究では,人の快不快に応じてエアーユニット動作することで,人による調整を必要とせず心地よい空圧を与えてくれるエアーユニットの開発を行う.これにより足部の血行悪化による疾患のリスクの低減が可能になる. 本研究では脳波を感性値として出力可能な感性アナライザを用いることで人の快不快の推定を行う.
電気刺激を用いた投射動作における運動熟達支援
Hikaru Tagaya
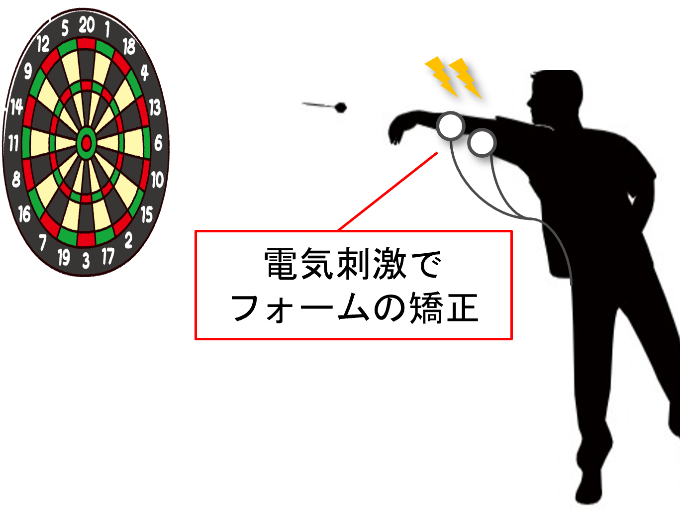
スポーツや楽器演奏において,同じパフォーマンスを繰り返し行う「再現性」を求められる場面は多い.しかし,ヒトの運動熟達支援の分野において,再現性についての研究はあまりなされていない.そこで本研究では,腕における運動動作に注目し再現性向上を目的としている.
提案手法では,繊細な動作が求められるダーツを題材とし,思い通りの位置に矢を投射させるシステムを開発する.投射時の腕のブレ,速さ,力を計測し,電気刺激によりフォームの改善を行う.
現在は,腕の電気刺激を測定し,解析方法を学んでいる.今後は,初心者と熟練者での特徴量を抽出,比較し,フォームの改善を行っていく.
9/2 15:30-16:00 | 9/3 12:00-12:30
筋電図を用いた能動的動作支援
Daisuke Yamazaki
福祉分野において,アシストスーツを用いた運動支援の研究が行われており,教育分野に応用が期待されている.
しかし,福祉分野における運動支援は受動的であり,運動学習に効果がない.教育分野においては,被支援者の能力向上が求められ,能動的な支援が必要である.この能動的な支援には,個人差が発生する. そこで本研究では,個人差を考慮した能動的な運動学習支援を目的とする.そのため, 筋電図により上腕を伸縮したときの筋肉の動きをリアルタイムに推定する.そして,機械学習を用いて筋肉運動の個人差を考慮し,モータによる運動アシストを行う.これにより能動的な運動学習支援が実現可能である.
筋電信号を用いた楽器演奏支援
Takahito Yamamoto
近年,楽器演奏支援の研究が注目されており,主に視覚や聴覚の情報を用いた間接的な支援が行われている.しかしながら,ギター演奏は指先で行なうため,触覚情報を用いた直感的な支援が求められている.
そこで本研究では,直感的な支援のために電気刺激を用いた楽器演奏における演奏支援を目的とする.ギター演奏は指先のみで完結し,筋電でのアプローチが可能である.そのため,ギター演奏時における熟達者の筋電信号を取得し,これをもとに未経験者に電気刺激を与えることで,目標コードのフォームへ制御するシステムを構築する. 今後の展望として,電気刺激装置の作成や,ユーザの弾きたいコードを選択可能なインタフェースの設計を行う.
9/2 16:00-16:30 | 9/3 12:30-13:00
ロボットが人と互いにタイミングを読むことができるシステム
Shuto Watanabe
今日,技術の発展により,ヒトと共生するロボットが求められている.その実現に不可欠な要素として,タイミングを読む・読ませるという動作が挙げられる.これはコミュニケーションの一種であり,人間の協調作業において非常に多くの場面で必要とされている.
そこで本研究では,ロボットとヒトが互いにタイミングを読むことができるシステムを提案する.今回の実験では,ヒトが予備動作からテンポを共有することでタイミングの推定を行う. 本研究によって人とロボットで合奏をすることができる.また,協調運搬など他の協調作業にも応用可能である.
修士課程・博士課程
9/3 13:00-13:30
複数のCoaxial-UAVによる協調搬送に向けた
姿勢制御
Yutaka Inoue

UAVは様々な場面で活用されており,荷物搬送に利用することで身体的負担を軽減することが可能となる.既存のUAVによる搬送では,搬送可能な重量の限界がある.
本研究では,複数のCoaxial-UAVを用いた協調搬送を提案する.従来の制御手法では事前に配置を決定する必要がある.そこで,「空気を読める」システムアーキテクチャを用いて姿勢制御を行う.この制御では,機械学習を用いて指令値の変化に伴う未来の姿勢角の予測を行う.複数機がリアルタイムに学習と予測を行うことで,任意の配置での制御を可能とし,目標に対する最適な動作生成が可能となる.実験では2機のCoaxial-UAVによる姿勢制御を行い,制御システムの有用性を示唆した.
人間と機械システムとの協調作業における
依存度の推定とその改善
Hikaru Nishimura
作業における人間の負担や労働人口減少の問題を解決すべく,人間と協調作業を行う機械システムが提案されている.しかし,アシストの影響により人間の操作量は変化し,機械へ依存してしまうことが問題として挙げられる.そこで,機械に対する人間の依存度の定量化に着目した.
本研究では,ニューラルネットワークによって事前に学習された人間の操作入力量と,協調作業時における操作入力量を比較して,依存度を評価する.また,リニアアクチュエータから成る力覚インタフェースとOpenGLによる描画を用いて,協調作業を目的とした実験を行う.本実験によって依存度が定量化されることにより,機械のアシスト量を調整することができる.これにより,機械に対する人間の依存度の低減へ応用することが可能となる.
9/3 13:30-14:00
口調から言葉の尺度を推定する会話システム
Yuzuki Baba
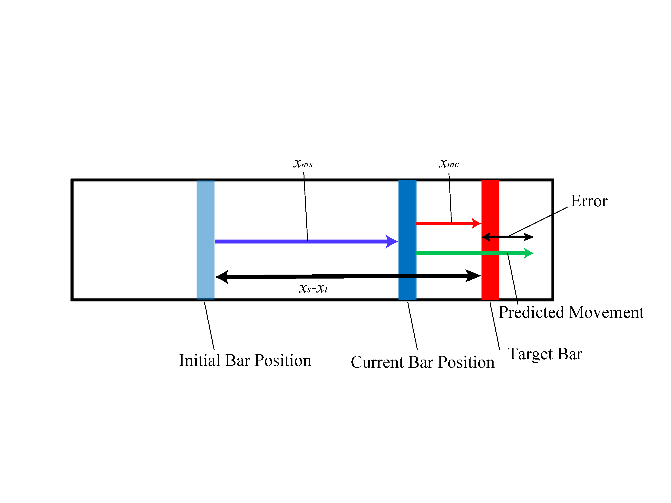
近年,スマートスピーカ等の会話システムの利用増加に伴い,人間との協働作業中に会話システムが導入されている.より円滑に意思疎通を行うために,口調などの非言語情報による少ない動作からたくさんの情報を取得することが求められている.
そこで本研究では,作業中の会話に注目し,口調の表現から話者の意図の推定を目的とした.推定では,LSTMを用いて音声と移動距離の相関を個人ごとに学習した.このシステムを評価するために,話者の指示により操作させる指示バータスクを作成した.システムへの指示内容として,バーの移動距離のみに限定した.結果として,口調から話者の意図を推定できることが示唆された.
温度提示を用いた自己覚醒補助による睡眠慣性低減法
Yugo Yoshida
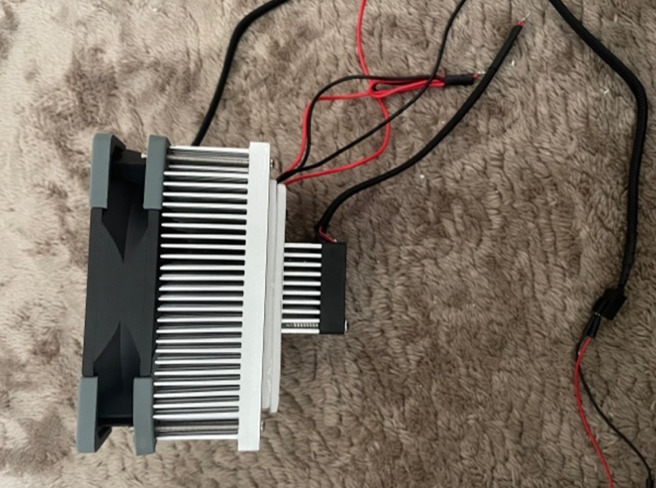
近年働き過ぎなどにより日本人の睡眠不足が問題となっている.解決策として仮眠が挙げられるが睡眠慣性という覚醒後のだるさや眠気などが起こる.睡眠慣性は睡眠の深い時に覚醒することで発生するため自己覚醒することで低減させることができる.そこで本研究では睡眠慣性の低減を目的とした自己覚醒補助装置を作成する.補助方法には睡眠の深さと皮膚温の関係を用いる.睡眠の深さは皮膚から放熱することで深くなる.そのため皮膚に温度提示をすることで放熱を妨げ,睡眠の深さを徐々に浅くし自己覚醒を補助する.
現在温度提示のためのペルチェユニット作成をしている.これは電流の向きによって暖冷が変わる素子を用いた温度提示装置となっており皮膚に温度提示を行う.
9/3 14:00-14:30
チームワーク評価における協調作業解析手法
Kota Kobayashi
モデルどうしによる協調作業推定を行い,推定結果を用いたチーム分けを目指したが,期待した推定精度が得られなかった.協調作業すべての推定を行っていたため,協調作業効率を向上させるために必要な情報以外の推定も必要になり精度向上が望めなかったと考えられる.
そこで,本研究では協調作業の解析によるモデル生成に必要な要素の厳選を目指す.従来の協調作業プラットフォームと比較してより単純化されたものを提案し,実験を行う.そして新たな「気づかい」の推定手法と解析手法の提案に基づき協調作業モデル生成精度を向上させる.改善されたモデルどうしによる作業結果により協調作業効率を向上させるようなチーム分けが可能になると考えられる.
カオス制御を用いた個性模倣と多様性維持による
ロボット動作戦略設計
Yohei Sugano
昨今,通信技術や半導体技術の発展に伴い,小型で高性能なロボットが開発可能になってきている.しかしリアルタイムで変化する環境での制御は難しく,動作設計において課題となっている.本研究では,この課題をカオス性と呼ばれる不規則な性質と,社会性動物の持つ個性模倣と呼ばれる性質を用いて最適な動作設計の実現を目的としている.提案手法では各ロボットが持つ個性値と呼ばれるパラメータを,カオス制御を組み込んだ模倣式を用いて個性値の最適化及び多様性を実現する.加えて,個体の性能を示すローカル評価値を模倣式に用いる事でリアルタイムでの最適な動作設計の実現を目指す.現在は,カオス制御による模倣式の改善を行ないながらより良い動作設計について行なっている.
9/3 14:30-15:00
熟達過程中の関節剛性変化を考慮した運動制御熟達支援に向けたデバイス設計
Tomoki Sumiya
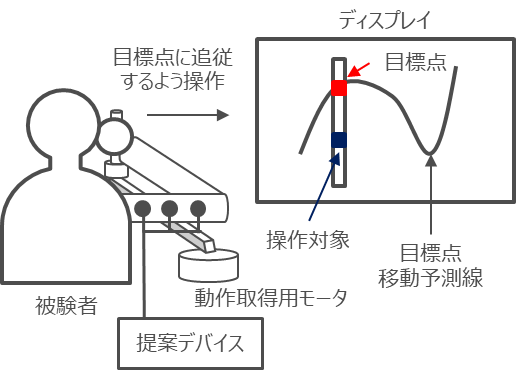
運動熟達とは脳からの指令と実際の動きを予測する内部モデルの獲得を意味し,熟達に伴って関節剛性や筋活動量が変化するという報告がある.
本研究では筋電図による関節剛性の評価と,神経筋電気刺激による筋収縮を両立させるデバイスを提案する.これにより外部から関節剛性を変化させることが可能となり,よりスムーズな運動への熟達を目指す. 実験では肘を操作系とした一自由度の目標追従タスクを行い,提案デバイスの有無による関節剛性の変化を比較する.今後の課題としては関節剛性のみならず運動軌道も適切に支援する手法について検討を進める.
描画動作のための力覚提示デバイスによる相補教示支援
Nao Takahashi
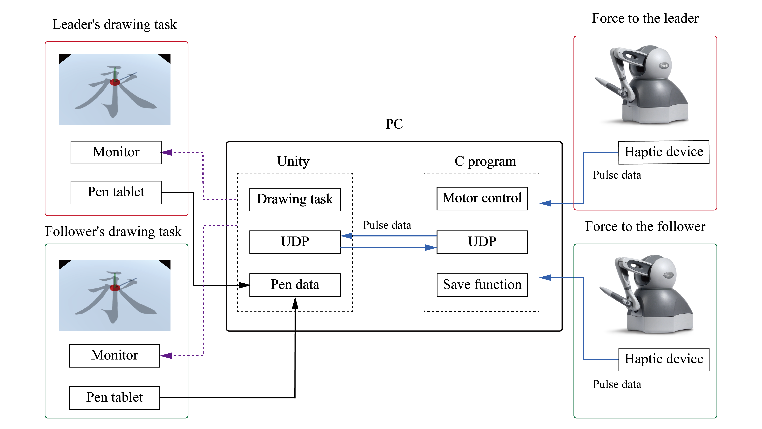
描画技能熟達のための力覚提示による支援として,教示者と学習者で力覚を共有し相補に教示するシステムを提案する.
現在,技能伝承が社会的課題であり技能熟達に関する研究が行われている.多くの研究では,学習者をいかに熟達させるかに焦点を当てている.しかし,教える側に着目した研究はない.本研究では教示者をも教え上手になるようにアシストする相補教示支援の確立を目指す.
教示者と学習者の力覚を描画動作において共有したとき,個人に最適なフィードバックゲインを与え,相補教示支援の有効性を明らかする.教示者と学習者の相互のインタラクションを支援することにより,人間機械システムにおける効果的な熟達支援を検討する.
9/3 15:00-15:30
VR技術の更なる発展に向けて: 汎用的な触覚モデリング
Keisuke Tozuka
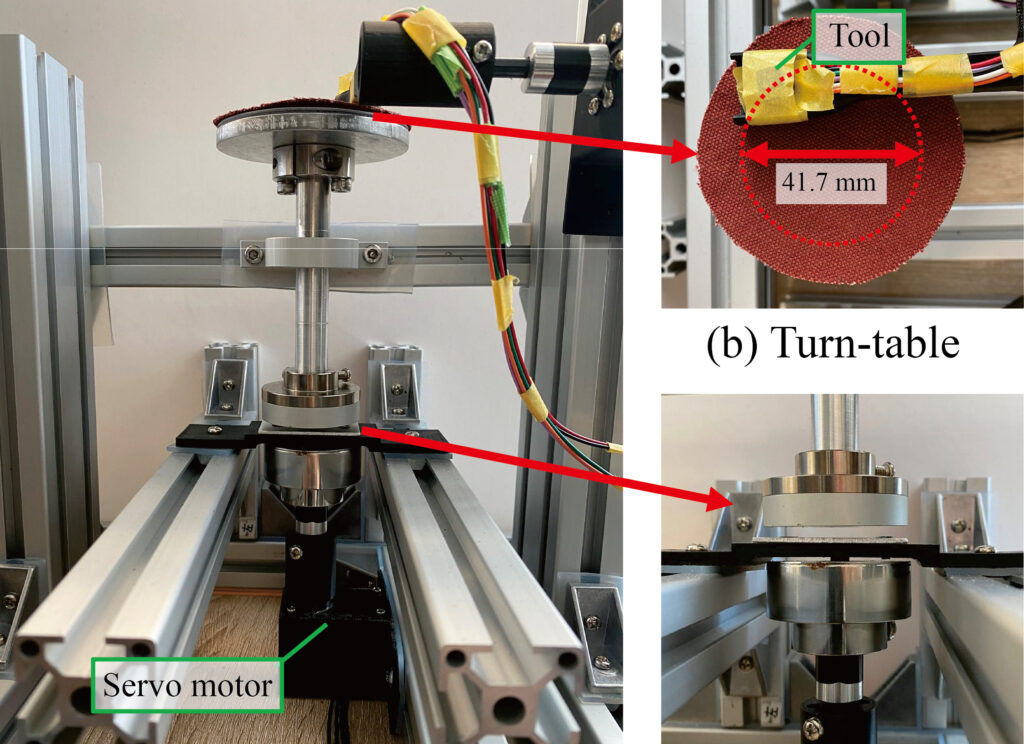
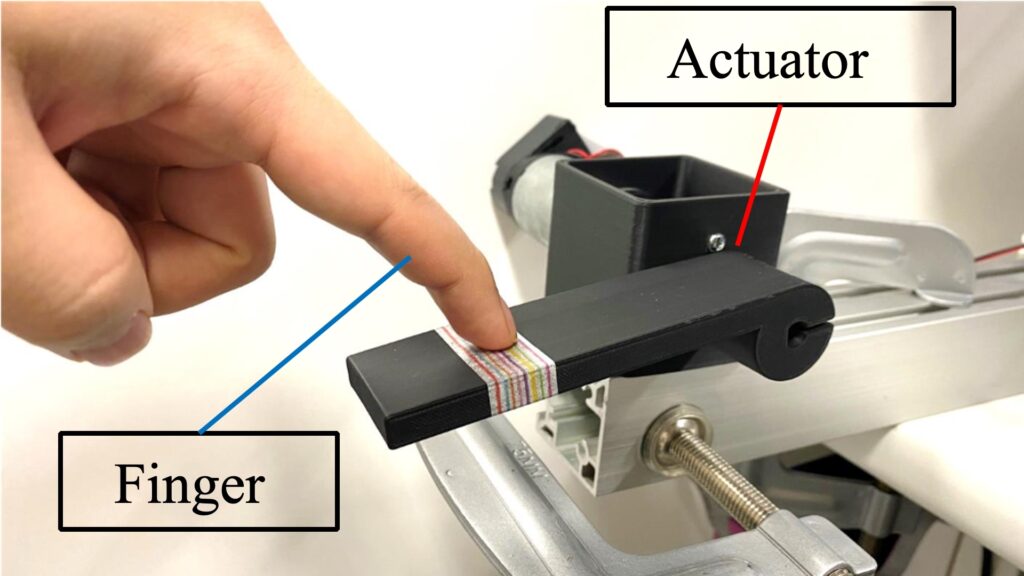
VRコンテンツにおいて臨場感を提供するためには,複数の感覚受容器へ同時にアプローチする必要がある.これまでの研究では,視覚や聴覚だけでなく,触覚も再現する手法が提案されてきた.しかし,触覚でテクスチャを識別させるためには,実際に測定する必要があった.
そこで本研究では,汎用的な触覚モデリング手法を提案する.図に示す測定装置でテクスチャを振動として測定し,周波数特性を取得する.取得した周波数特性をPEQ (パラメトリックイコライザ)とホワイトノイズで近似する.この周波数特性には,テクスチャの粗さや硬度の影響を受ける.つまり,PEQのパラメータを粗さや硬度をもとに調整することが可能となり,触覚モデルの汎用化が達成できる.
早期楽器演奏熟達支援システム
Hikaru Nakanishi
鍵盤楽器演奏者の直感的な学習支援システムの構築を提案する.これまで,視覚提示に依存した熟達支援が多く,汎用の難しいアシストが多かった.鍵盤楽器演奏において特に鍵盤楽器の打鍵操作を操作者が聴覚によって音圧レベルを判断する事は困難である.そこで,本研究では聴覚フィードバックによる打鍵操作パフォーマンスの精度を向上させ,それにより早期習熟を図る.演奏者の鍵盤から受ける触覚フィードバックによって強弱操作パフォーマンスを向上させる方法について提案した.熟達可能な聴覚評価のための技能が存在する可能性が示唆され,これを元に聴覚フィードバックのアシストへと応用する.
9/3 15:30-16:00
個人差を考慮した協調作業の力覚アシスト手法の提案
Genki Sasaki

本研究では協調作業中の集団作業効率を向上させるため,個人差を考慮した協調作業の力覚アシスト手法を提案する.
協調作業の集団作業効率を向上させることは,チームワーク支援や作業者の負担を軽減につながる.それを実現するため本手法では個人差を考慮した協調技能の定量評価を行っている.この評価手法を「気づかい」と呼び,「気づかい」による力覚フィードバックによって協調作業のアシストを行う.「気づかい」は集団作業効率に相関を持ち,「気づかい」を用いたアシストは集団作業効率の向上に寄与する.実験では協調作業中の作業者に対して力覚フィードバックを行い,集団作業効率を測定した.