近年,工場用のコンテナクレーンやゴミ処理場に使用されているごみクレーンの多くは,入力デバイスとしてジョイスティックなどを用いています.これはレバーを前後左右に傾けるだけで操作することが出来るため,複雑な操作がいらず,より直感的に操縦することが可能となっています.しかし,ジョイスティックの欠点として何処かに接地させる必要があります.そのため,操縦者の視点が固定されてしまうので,操作中に確認できない領域が存在してしまいます.
その問題を解決するため,非接地型の入力デバイスに関しての研究も進んでいます.例えば,手のひらのジェスチャによって操縦するものもありますが,この場合ではフォースフィードバックがないため,操縦者は自分の入力がどの程度なのかを直感的に理解できないので,思うように操縦できないなどの問題が発生してしまいます.また,非接地型の力覚呈示が可能なデバイスも存在しますが,この場合発生するのは引っ張られるような力(けん引力)のみなので,傾けた際に既定値に戻るような力は発生させられていません.
そこで本研究では,フライホイールを高速で回転させることに発生するジャイロ効果を用いて,デバイスに「既定値に戻るような力」を発生させることにより,空中でジョイスティックを操縦させることを目的としています.このデバイスは無線化し独立しているため,あらゆるデバイスにリンクさせることが出来るほか,従来のジョイスティックを用いたデバイスに対しての新しいデザインを考えるきっかけになると考えています.また,この技術の応用として,近年注目されているVRコンテンツに対応することで,コードの絡まる心配がなく,よりアクティブな動きに対応できると考えています.
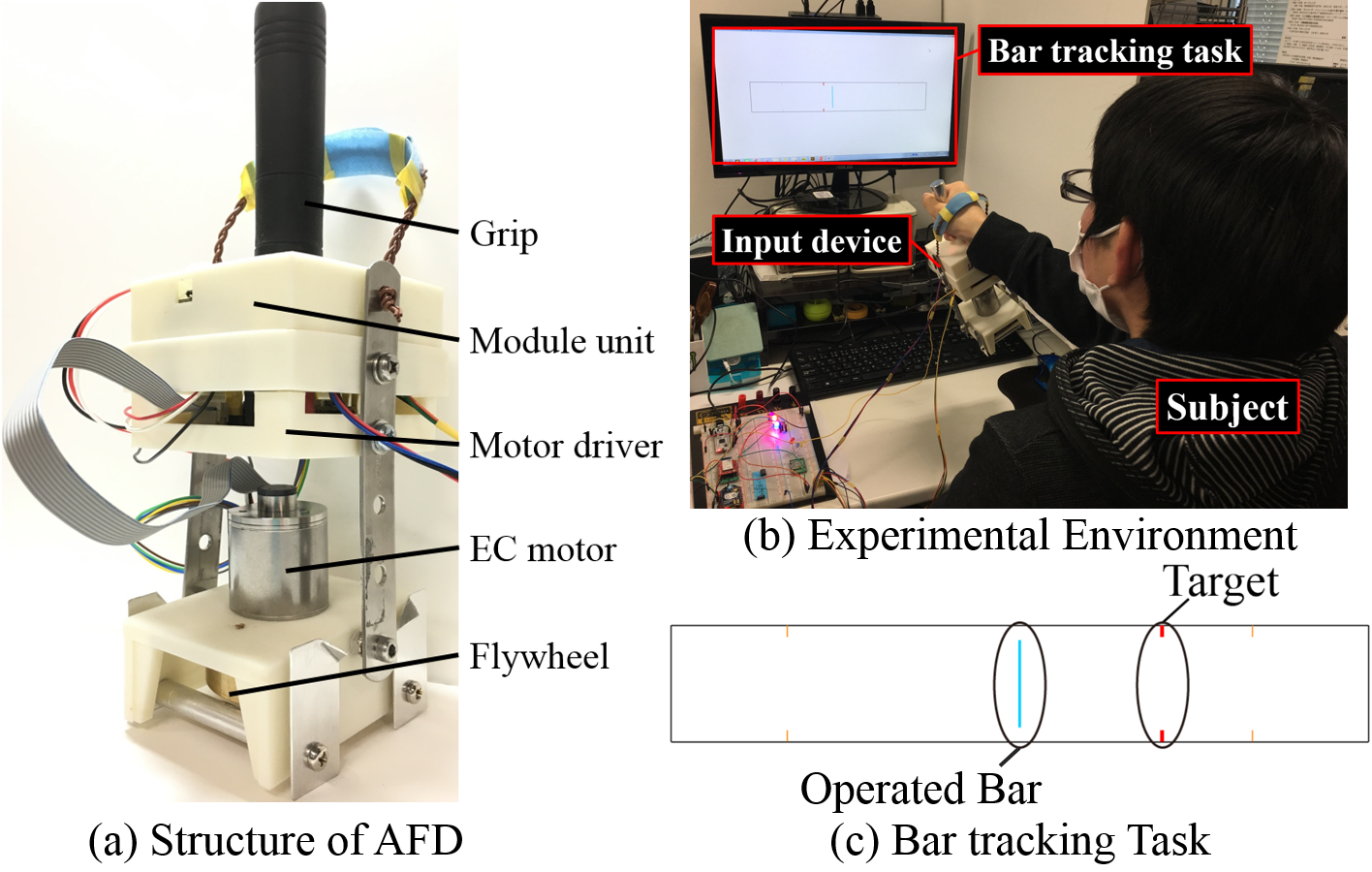
現在,試作機(Aerial Force-feedback Device : AFD)を開発し,実験としてOpenGLを用いた目標線追従タスクを行い,回転の有無,及びリアルタイムで回転数を変化させた場合の本デバイスの有効性を検証しています.現在の結果として,回転数をリアルタイムで変化させた場合に,部分的ではありますが,回転なしの場合と比べ位置誤差が減少していることがわかりました.今後の課題として,回転体の高速回転によるデバイスの振動軽減を行い,追従性のさらなる向上を目指します.