サブリミナルキャリブレーションによる機械操作熟達支援
ヒトが介在する機械操作において,初心者のミスを低減し,高いパフォーマンスを発揮できるようアシストするための研究が数多く行われています. しかし,時としてアシストが大きなお世話となり競合を引き起こしたり,さらに初心者の熟達の機械を奪う可能性があることが問題となります. そこで,本研究はヒトの学習熟達能力を考慮した新しいアシストの手法 サブリミナルキャリブレーションを提案しています.
ヒトが思い通りにロボットを操作できる状態とは,その操作者が脳内に構築したロボットの挙動イメージと実際のロボットの挙動が一致している状態と考えます. わかりやすく言えば,「このくらいジョイスティックを倒せば,きっとロボットはこのくらい動くだろう」という予想が十分に当たる状態です. このように考えると,ヒトの操作熟達とは,操作対象のロボットの挙動を正しく予想できるようにイメージを修正する過程であると考えることができます. そこで,ヒトのイメージに近づけるようにロボットの挙動(ダイナミクス)を修正すればきっと熟達を促進できると考えました.
実験では,ロボットを使って目標を追従する作業で,その誤差が小さくなる(イメージ通り動かせる)ようにロボットのダイナミクス特性の修正を行いました. しかし,熟達の促進どころか,むしろ操作の邪魔となっていることがわかりました. この理由として,操作者がお手本としているロボットの特性が刻一刻と変わってしまうことで,熟達が進まなかったと考えられます.
そこで,このロボット特性の変化をヒトに気づかれないように(サブリミナルに)実行するという着想に至りました. 実験の結果,操作者はロボットの変化に気づいていないにもかかわらず,その操作精度を向上できることを実験により確認しました. この手法は,ロボット遠隔操縦のみでなく,義手や義足などの福祉機器を短時間で思い通りに操れるようにできる技術であると考えています.
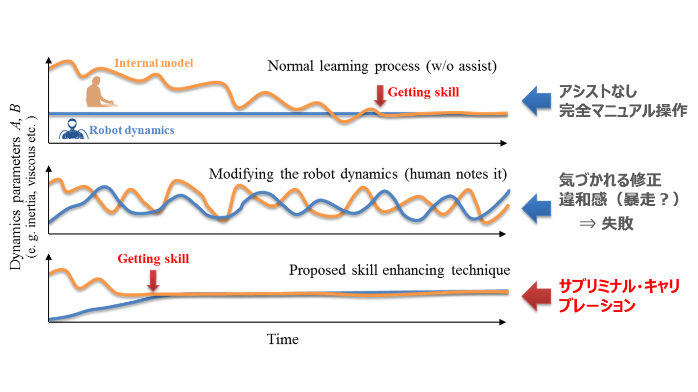
人間の熟達過程モデル
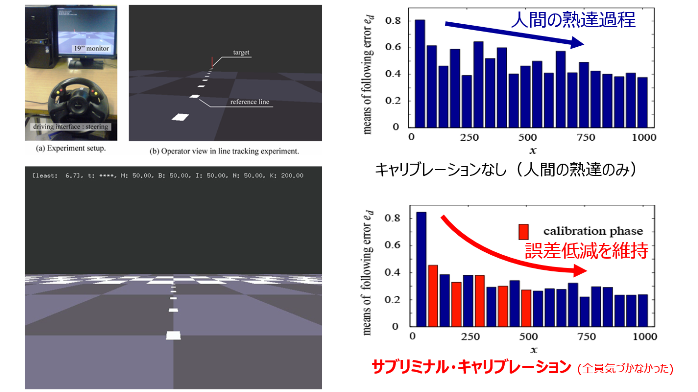
ホバークラフト操作実験
主な発表論文
- 五十嵐 洋: “機械操作早期熟達のためのサブリミナルキャリブレーション”, シミュレーション学会誌,Vol. 33, No. 2, pp. 42 – 47, 2014/06
- H. Igarashi: “Subliminal Calibration for Machine Operation”, Journal of Advanced Computational Intelligence and Intelligent Informatics,Vol. 16, No. 1, pp. 108-116, 2012.