UAVは様々な場面で活用されており,荷物搬送に利用することで既存の搬送手段の代替とすることが期待されています.
これまでのUAVによる搬送では,搬送可能な重量に制限があります.
そのため,複数機を用いた搬送について研究が行われてきました.従来の複数機を用いた研究では,UAVどうしの位置関係の把握や,タスク全体の厳密なシステムモデリングが必要でした.
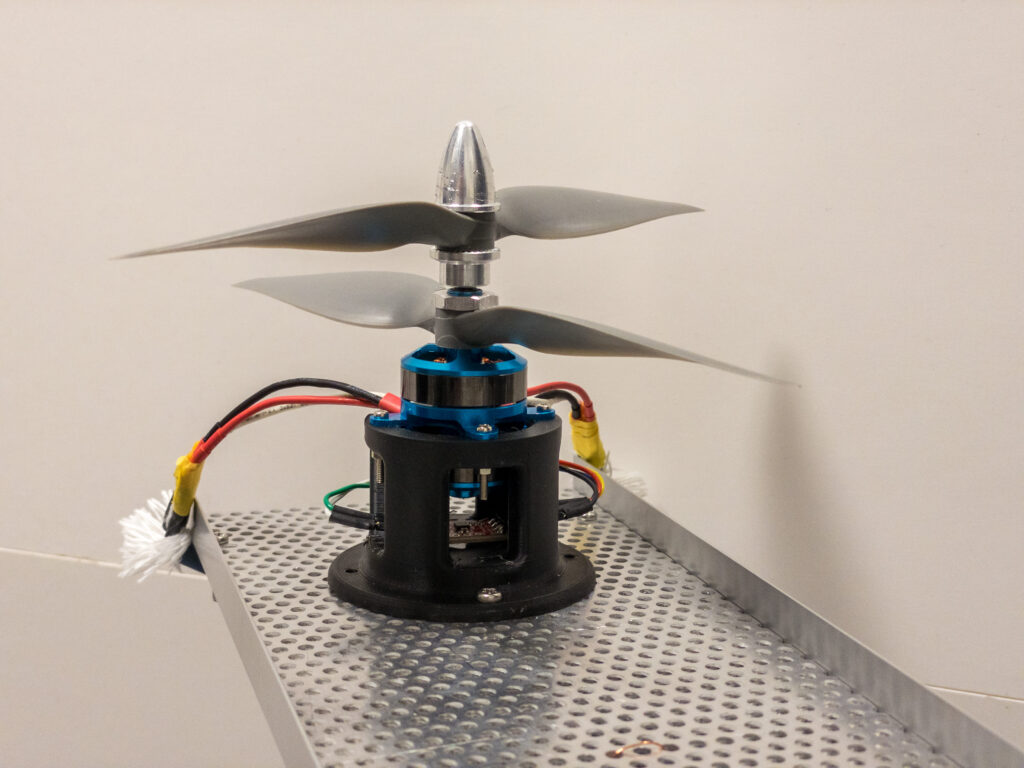
そこで,本研究ではCoaxial-UAVを複数用いた協調搬送システムを提案します.このUAVは,一つの搬送物に対して任意の箇所に複数配置します.この時,任意に設置されたUAVの相対位置を把握していなくても,機械学習によって環境情報を獲得します.そして,目標とされる姿勢に向けて制御を行います.制御にはSTAアーキテクチャという手法を用います.
実験結果として,STAアーキテクチャによるUAV制御法を構築し,2台を用いた1自由度での制御可能性が示唆されました.
今後はより他自由度での実験を重ねていくことで,拘束していない環境下での飛行を可能としていきます.
この研究により,運搬物の重量に応じてUAVの数を変更することで,様々な物を運搬することが可能となり,人々の生活により溶け込むことが可能なUAVの将来が期待されます.