-
 ロボット間協調
ロボット間協調
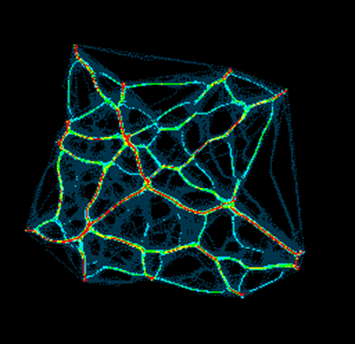
Development and Evaluation of a Multi-Agent System Simulating Desire Path Formation to Automate Optimized Network Design
This research aims to propose a multi-agent model to design transportation systems that minimize the total cos […]-
 crlweb
crlweb
-
-
 ロボット間協調
ロボット間協調
模倣と多様性維持による社会的協調理論
五十嵐 洋(東京電機大学) キーワード:マルチエージェント,模倣,多様性,社会的協調アルゴリズム-
crlweb
-
-
 ロボット間協調
ロボット間協調
個性模倣と個人学習を両立するマルチエージェントによる適応誘導システム
自律エージェントの集団協調行動をマルチエージェントシステム(MAS)といい、ロボティクス、情報工学、数学、化学など様々な分野において注目されています。中でもロボティクスの分野において、災害現場や深海、深宇宙など人間の介入 […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
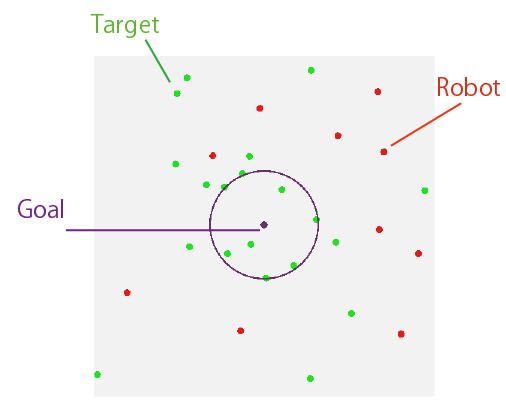
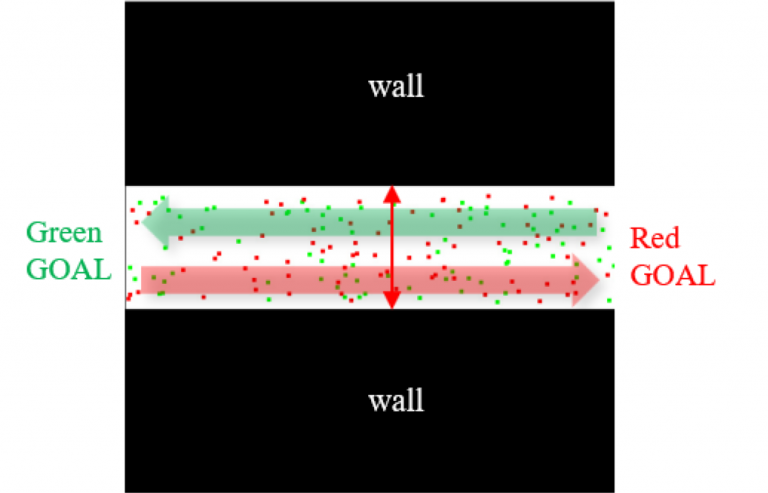
マルチロボットシステムによる協調作業および人間介入がシステムに及ぼす影響
近年,急速な通信技術の発達に伴ってロボット間での高速な通信が可能となってきており,複数台のロボットによる協調作業の研究が盛んに行われている.複数台のロボットを用いたマルチエージェントの対象問題として牧羊犬問題が挙げられる […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
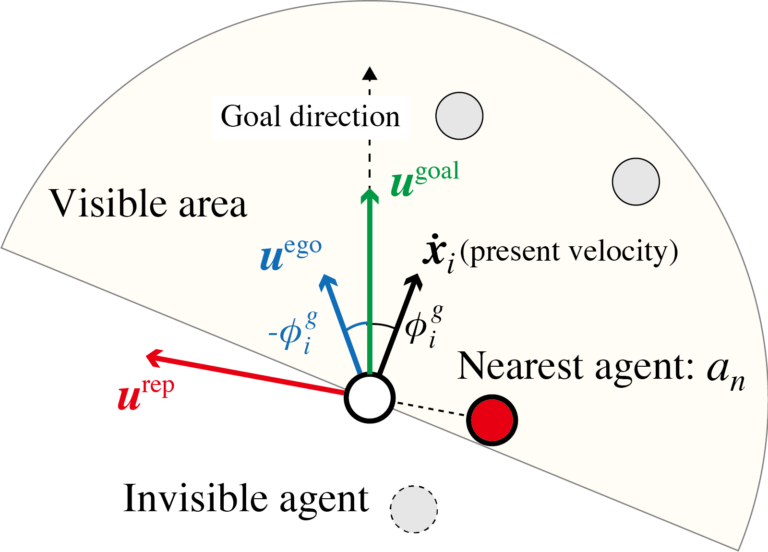
個性模倣によるリアルタイム環境適応アルゴリズム
今日,複数ロボットを用いた協調作業では,事前に環境適応させた動作戦略設計がされています.しかし,こうしたロボットでは予期せぬ外乱に対して機能することが出来ない問題点がありました.そこで本研究では,人間の社会性認知にみられ […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
Group Trajectory Optimization using Swarm Intelligence
Group Trajectory Optimization using Swarm Intelligence Nowadays, Industrials are relying more than ever on ful […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
複数の移動ロボット間での機械学習の共有による適応制御の効率化
近年,災害調査など危険な場所や人の立ち入りが困難な場所でのロボットの活躍が増えていますが,このような環境では路面の摩擦などが未知であるため車輪型移動ロボットが目的通りに正確に走行することは困難です. 本研究ではロボットの […]-
crlweb
-