概要
近年,特に自動車産業においては完全自動運転実現に向けた開発が急速に進められており,その中で人間が運転に介入すべき場面は減少していくとみられる.しかし,その実現には多くの課題があるため人の運転行動を解明することは重要である.また運転に限らず,その他の場面においても人は「認知」「判断」「操作」を無意識に行っている.その上で視線情報は意図推定などにも用いられる.
本研究では視線情報から最終的に「判断」についての予測をすることを目的とする.そして実験ではドライビングシミュレータとアイトラッキングを用いて視線情報を非接触で取得する.また走行路形状の見誤りを判断ミスとして走行データを運転行動として視線情報との相関分析を行う.
はじめに
近年,自動車業界は日本の主要産業として様々な課題解決のため多角的な視点による分析が求められている.従来から抱えている課題として交通事故が挙げられる.これは減少傾向ではあるが事故の根絶は難しく,より安全な社会のために警察機関による取り組みや調査機関などによる分析が行われている[1].また今後に向けた課題として先進的な自動車開発が挙げられる.また自動運転の先駆けの技術として既に先進運転支援システムがある.これを搭載した先進安全自動車 (ASV : Advanced Safety Vehicle) が登場しているが, まだ自動運転の完全実現には年月がかかる.
両領域で問題が解消されない要因として予測すること のできない人の行動という存在がある.そこで本研究では人間工学として自動車運転を読み解くために,その際の視線運動について分析することに着目した.これは視覚は人が状況を知覚するための情報源として約9割を占めており有益な生体信号と言えるからである[2].また関連研究としては車線変更予測を行う研究などがあった[3].また先行研究としては視線から軌道および意図予測を行う研究などがあった[4].また従来技術としてはドライ バの状況を監視するための ASV などが登場している.
本研究では視線情報と運転行動の関係を見出すことを 目的とする.また人は認知・判断・操作のサイクルを無意識に行なっており,ここでは判断について着目した.そ のために自動車運転の実験を行い視線の解析を行う.また視線と運転の関係を見出すことは運転者 – 自動車間との協調,手動・自動運転が混在する社会での他車との協調,自動車運転以外の判断時の視線解析や心理的な要因解析などの研究応用が展望として考えられる.
提案手法
視線情報および運転行動を同時に取得するためのシステムを提案する.このシステムはアイトラッキングの他,操作入力のためのステアリングコントローラ, シミュレーションスクリーンの 3 つで構成されている.またシミュレーションはタスク時における視線位置座標および運転状態を記録される仕組みとなっている.このとき自動車の運転は障害物に接触しないように行うタスクとした.また障害物に接触した回数や箇所を記録する他,視点位置座標の差から求めた視線運動の躍度よりタスク成功度,運転熟練度による分析を行う.
実験
実験タスクにおいてテストコースは 1 周 5 km のハイウェイで構成されており,これを曲線路に設置されている障害物に衝突しないよう 1 周する.まず被験者はアイトラッキングのキャリブレーションを行った後,座席調整などを行う.また練習としてテストコースと同一道路であるデモコースを 1 周した後,本番のタスクを行う.このデモを行なっている間,被験者は 車両操作・特性を理解する他,実験指導者より本タスク の詳細な説明を受ける.また被験者は免許有および週 1 回以上の運転頻度の被験者 A を熟練者として免許無の被験者 B を非熟練者とした.
被験者は中央車線を走行する他,曲線路に等間隔で設置されているコーンを避けるように求められている.そして速度は 100 km/h を保ち,± 20 km/h を超えた場合は実験指導者から是正を受ける.
取得した視点位置座標の差分より躍度を求めタスクでの推移を確認する.また躍度 (J : Jerk) とは加速度時間変化をさらに時間変化で微分したものであり座標 X(x, y) より式 (1) で示される.これより算出した視線運動の躍度を曲線路区間ごとに平均化し,その推移から比較および検討を行う.また被験者ごとにタスク成功度についての躍度の解析も同様に行う.

結果
実験タスク成功度の評価として被験者 A は設置コーン数 50 のうち接触数 1,B は 2 であった.どちらの被験 者も 6 つある曲線路のうち 6 番目で接触していた.この他では並んでいるコーンは 5 列だったが,この曲線路で は 10 列あり約 2 倍の区間長であった.このことから最 終コーナーは難易度が上がっていることが確認できた.
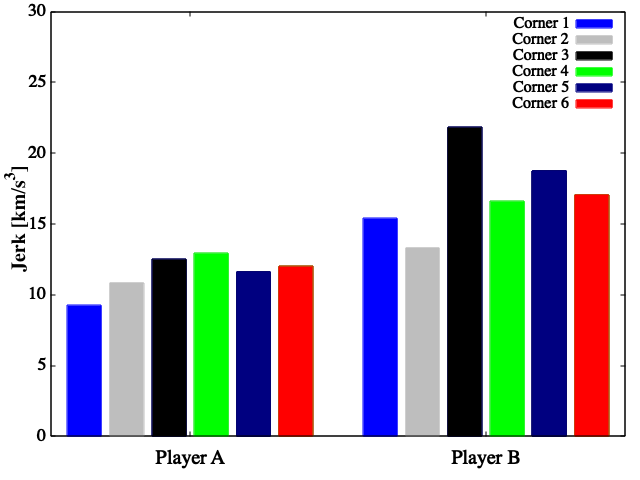
視線運動はそれぞれの曲線路においてコーナー直前の 5 秒間とコーナー走行中の区間のデータから躍度を算出 した.それぞれの区間における視線位置座標の変化から 曲線路ごとでの躍度平均の推移を確認した.また視線位置座標はカーブに連動し左右に動き,どちらの被験者も進行方向を見ていたことを確認した.被験者 A, B ともにタスクが進むごとに躍度平均は上昇傾向にあるこ とを確認した.また被験者 B は曲線路ごとで平均躍度の変化が大きいことが確認できた.このことは非熟練者は視線運動が不均一であることを示唆している.
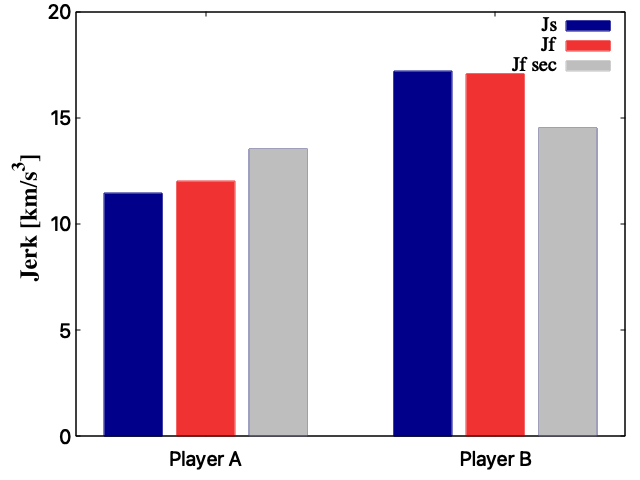
両被験者も 6 番目の曲線路で コーンに接触していた.そのためタスク成功時の曲線路 (corner 1~5) の平均躍度,失敗時の曲線路 (corner 6) の平均躍度,失敗時のコーンに接触前 1 秒間の平均躍度と分類し,それぞれ Js, Jf, Jf_sec とした.このとき被験者 A はタスク難化で平均躍度 が向上し,さらに被験者 B は A よりもそれぞれ高い平均躍度を示したが接触前 1 秒間では減少していた.また被験者 B が A よりも視線運動が活発に行われたのは焦りによるものであると考えられる.これは被験者 B は A よりも運転に不慣れであったことも原因であるが,より被験者と試行数を増やし検討すべきである.
おわりに
本研究ではドライバの視線情報を取得し運転行動との 関係を確認した.また今後は被験者や試行を増やし一曲 線路内での細かい区間での分析なども行いたい.その他 にもタスクをより難化させた際の実験も検討している.
視線と運転の関係を見出すことが可能となれば運転者 – 自動車間,他車間協調などにおける発展を期待できる.また本研究では自動車運転に着目したが人の判断時の心理的要因などの研究応用も展望として考えられる.