高齢化社会の進展や労働環境の多様化に伴い、人間の身体能力を拡張する追加四肢技術への需要が高まっている。特に筋電信号(EMG)を用いた制御方式は非侵襲的で柔軟な操作が可能である一方で、新たな運動スキルの習得が必要で、効率的な学習支援手法の確立が重要な課題となっている。
また、従来の追加四肢研究では、主に制御アルゴリズムやハードウェア開発に焦点が当てられており、学習支援手法に関する体系的研究は限定的であった。運動学習理論において、Knowledge of Performance(KP)フィードバックは運動実行過程の質的情報を提供し、学習効果の向上に寄与することが知られていますが、追加四肢のような新規性の高い運動システムへの適用可能性は明確ではない。
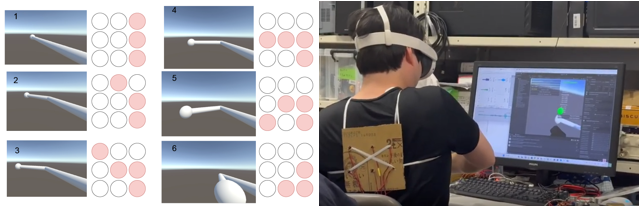
そこで本研究では、EMG制御による1自由度の追加四肢システムとVR学習環境を構築し、KPフィードバックの学習効果を定量的に評価することで効率的な学習支援手法の有効性を検証した。