楽器演奏には長期練習が必要であり,それを支援する研究は広く行われています.しかしながら,そのような研究は視覚情報や聴覚情報を用いたものが多く,触覚情報を用いたものは未だ発展途上となっております.ヒトが楽器を演奏するときは,それら視覚情報や聴覚情報を,触覚情報に変換して手指運動を行っています.従って,触覚情報による支援がより有用的であると考えられます.
そこで,本研究では触覚情報を用いた楽器演奏熟達支援を行います.触覚情報の提示にはハプティックグローブと呼ばれる,手とコンピュータ間を結ぶコントローラのようなものを用います.その主な使用用途としては,仮想現実空間内においてヒトの手指運動情報の計測や,フォースフィードバックをするものが一般的でありますが,本研究ではグローブを熟達者と非熟達者に装着し,熟達者の手指情報を非熟達者に与えることによって熟達を支援することを目的としています.
グローブの制御には外乱オブザーバ及び反力推定オブザーバを用いることによって,触覚情報をお互いの指に与えあう制御を行っています.このグローブを使用することにより,熟達者と非熟達者の指を同期することが可能となり,またそのときに楽器演奏の熟達支援を行い,FFT解析を行った際に,熟達者の演奏が熟達者の演奏と一致することを確認しました.
Haptics is one of effective interface giving information as a position, force, and object texture.
When people learn to motion like playing musical instruments, visual, hearing, and haptics feedback are valid.
In this paper, we proposed haptic assist on musical instruments playing.
As a method of haptic presentation, a haptic glove with bilateral control is developed.
The glove has some small geared motors for each finger joint.
As a result, the proposed method showed the usefulness of an intuitive learning teaching system by haptic feedback.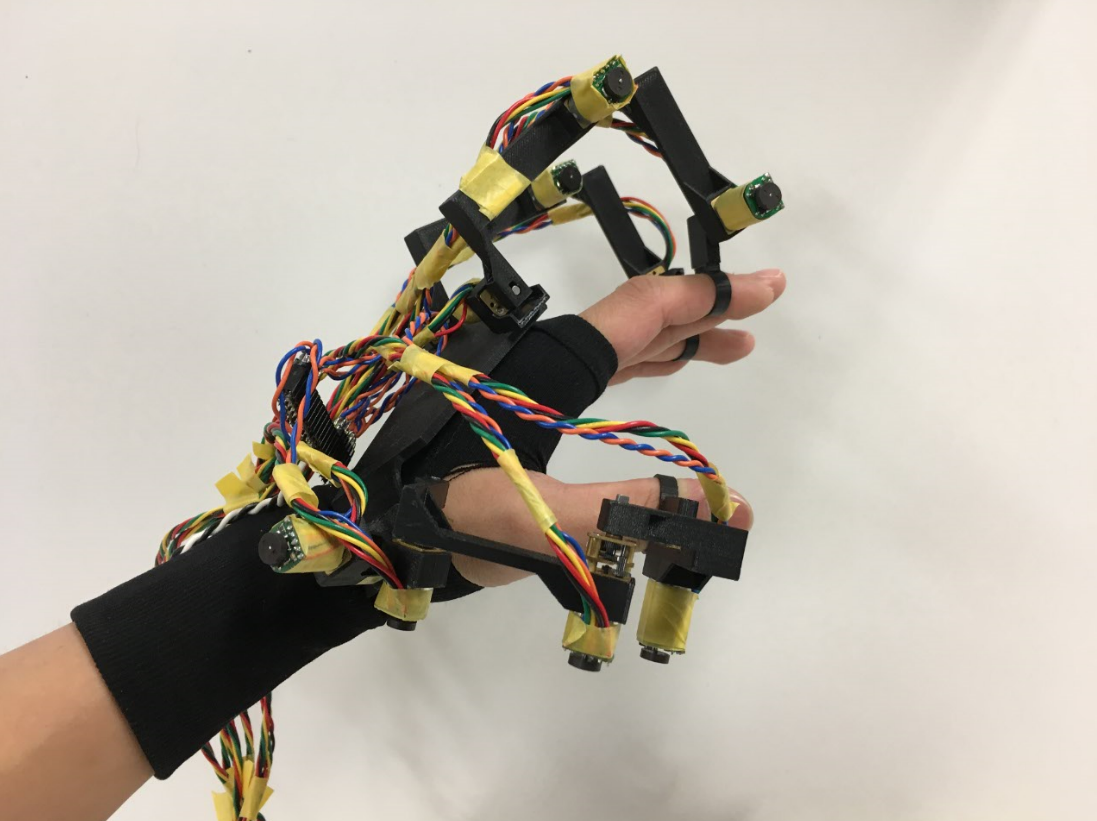
主な発表論文
- 芦森和茂,五十嵐洋:“熟達者の力提示を用いた楽器演奏熟達支援”, 日本機械学会ロボティクス・メカトロニクス講演会’17, 2P1-N01, 2017/05/12.
- K. Ashimori and H. Igarashi, “Skill assist system for musical instruments by skilled players force feedback,” 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), pp. 2008-2013, Edinburgh, 2017.
- 芦森 和茂、五十嵐 洋:“触覚提示による相補教示支援”,第18回 計測自動制御学会システムインテグレーション部門講演会,1C3-14,2017/12/20
- Kazushige Ashimori, Hiroshi Igarashi: “Complemental Learning Assist for Musical Instruments by Haptic Presentation,” 15th International Workshop on Advanced Motion Control (AMC2018), pp. 175-180, 2018/03/11
- K. Ashimori And H. Igarashi, “Complementary Learning Assist System: Guitar Performance Assist by Haptic Presentation,” 2018 International Conference, HCI International 2018, Las Vegas, NV, USA, Proceedings, Part III, pp. 11-16, 2018/07/18-19.
- 芦森和茂,五十嵐洋:”相補的学習支援システムにおけるグローブ型デバイスの開発”,ヒューマンインタフェースシンポジウム’18, 28D, 2018/09/06.