この研究は、ヒト同士が協力して行う作業について、工学的に解析することを目指しています。そして、解析結果から協調作業に携わるヒトへの支援システムや、ヒトと共に作業できるようなロボット開発への応用を考えています。
近年、日本はスピードの早い少子高齢化に伴って、労働力の減少が課題の一つとなっています。このギャップを埋めるために、日常的社会活動におけるロボットの活用が求められてきています。これに伴い、ロボット開発の研究分野においても、人工知能の登場により、さらに発展してきています。
高い知能と自律性を備えた自動化システムやロボットは、人工知能の導入により、特定の作業について効率的な動作を実現させています。こういった成果から、生産現場の省力化を可能にし、労働力減少のギャップを埋めてきました。一方で、ヒトどうしが協力して作業する工程や、大規模な建設・搬送作業などの場面で活躍できません。これは、他者にあわせた制御が難しいこと、急な状況変化に対応できないこと、ヒトとのミスマッチが壁となっていることが考えられます。
逆にヒトは、誰かと一緒に協力しながら作業することができます。それは、他者が現れることで自分の行動を変えたり、相手のミスや理解の違いという状況変化にもある程度対応できるからだと考えられます。私はこの要素について、工学的に解析できないか挑戦しています。
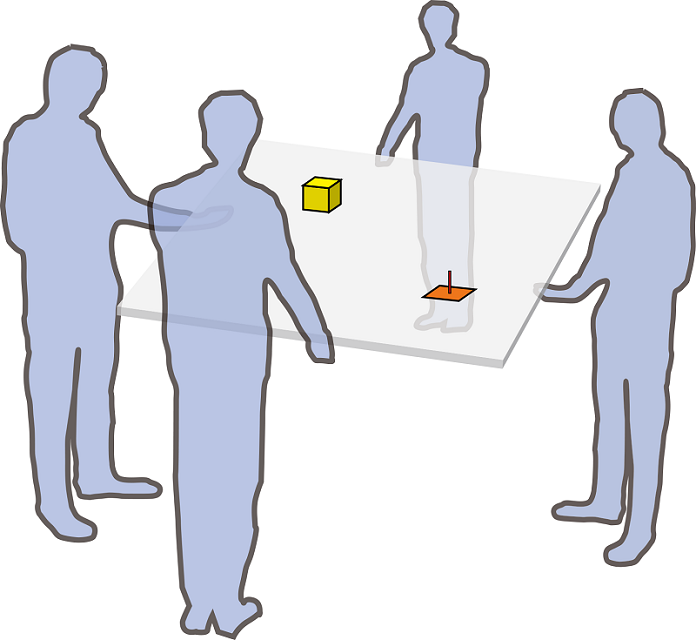
この研究では、ヒトが誰かと作業するときに起こる、行動の変化に注目しました。たとえばヒトは、誰かと一緒に物を持つとき、一人の持ち上げ方と異なる動き方をします。それは誘導する形で勢いよく持ち上げたり、逆に相手の行動をうかがいつつゆっくりと持ち上げることもあります。(どちらも作業に対して効率的に働くかどうかはわかりませんが)こうした一人のときとは異なる行動を、「気づかい」と呼称し独自に定義しました。
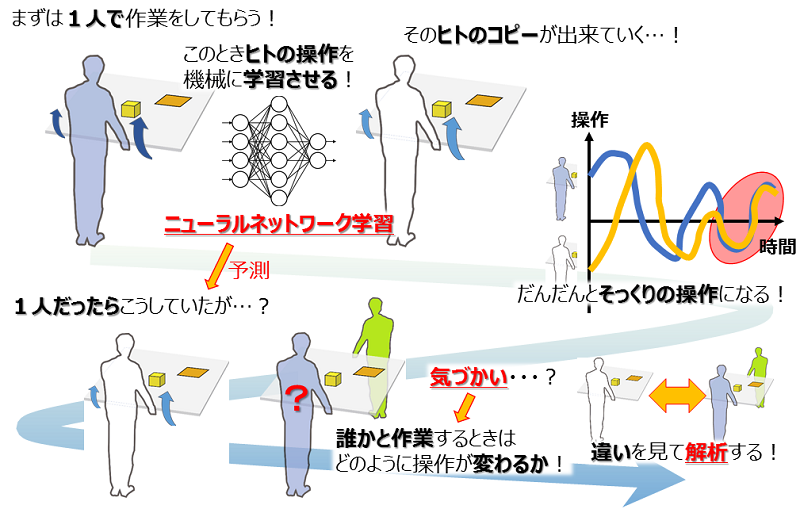
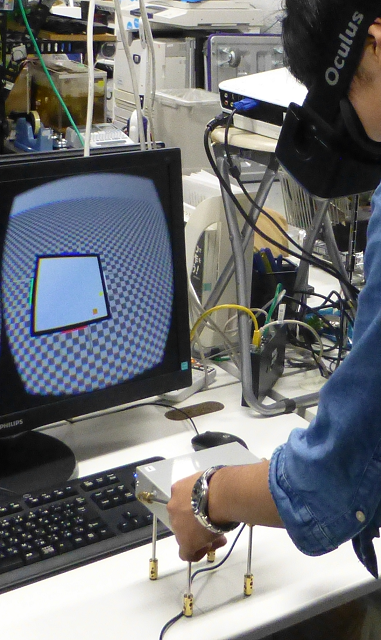
この「気づかい」を推定するにあたり、協調作業に関わる要素が定量的に計測できる必要があります。また、複数名で作業できる必要があることはもちろん、一人でどう行動したかを計測する必要があるため、1名から複数名でできるような作業を想定しなければなりません。私は、こうした作業として、プレートコントロールタスクと呼ぶバランスゲームのような仮想的な協調作業を提案しました。さらに、それを実行・構成するプラットフォームの開発を行いました
これまで私の研究は、作業者の操作中に含まれる「気づかい」の推定を行い、協調作業の効率に影響を与えていることが示唆されていると示してきました。現在では、お互いの「気づかい」による相性という視点で研究を進めています。さらに、この「気づかい」の量に応じて、システム側がアプローチしていくことで、協調作業の効率化に貢献できるのではないか、と考えています。これを発信することで、「気づかい」推定の有効性を示していきます。
この研究において、作業者は協調作業(プレートコントロールタスク)に対して角度という位置情報のみで操作することとしています。しかし、実際の協調作業というものは、他者の力が返ってくるということがもちろん考えられます。こちら(別の研究テーマへ飛びます)の研究テーマでは、この力情報を取り入れた上で、協調作業における「気づかい」の推定および解析を行い、研究が進められています。
主な発表論文
- 新居駿也,五十嵐洋:“協調作業を行う人間同士の相性とパフォーマンスの解析”,日本機械学会ロボティクス・メカトロニクス講演会’17, J02-2, 2017/05/12.
- 新居駿也, 五十嵐洋: “複数名での協調作業における気づかい相性分析”, 第34回日本ロボット学会学術講演会, 3G2-04, 2016/9/9.
- 新居駿也, 五十嵐洋: “協調作業におけるチームワークの定量的解析: 気づかい推定による作業者同士の相性評価”, 日本機械学会ロボティクス・メカトロニクス講演会’16, 2A2-15a7, 2016/06/10.
- Shunya Nii and Hiroshi Igarashi: “Estimation of Teamwork in Cooperative Tasks by Multiple Persons,” The 2016 RISP International Workshop on Nonlinear Circuits, Communications, and Signal Processing, 8PM1-4-3, 2016/03/08.
- 新居駿也,五十嵐洋:“共同作業における人数を考慮した気づかい推定”,電気学会知覚情報研究会,pp.23-28,2015/08/10.