-
 活動報告
活動報告
日本機械学会 知能・情報・精密部門講演会 IIP2026に参加
2026年3月1日から3日に名城大学天白キャンパスにて行われた日本機械学会 知能・情報・精密部門講演会 IIP2026に、本研究室から2名の教員が参加しました。 本研究室のPIである五十嵐 洋教授が「自由エネルギー原理と […]-
 crlweb
crlweb
-
-
 ロボット間協調
ロボット間協調
自律分散型マルチエージェントシステムによる不規則的状況変化への対応検証
背景 近年,災害現場の探索や宇宙空間での活動など,事前の環境予測が困難な領域において,各機の問題に対する頑健さや,システム規模変更の容易さ,柔軟なシステムの変化による環境変化への適応という特性から,自律分散型マルチエージ […]-
crlweb
-
-
 人間センシング
人間センシング
仮想環境における運動遅延が身体性知覚と視線行動に与える効果の検証
バーチャルリアリティ (VR) 体験において、ユーザーが仮想空間内のアバターを自己の身体として感じる身体性 (Sense of Embodiment)は、学習効果や作業効率を高める重要な要素である。しかし、その評価は主に […]-
crlweb
-
-
 人間機械システム
人間機械システム
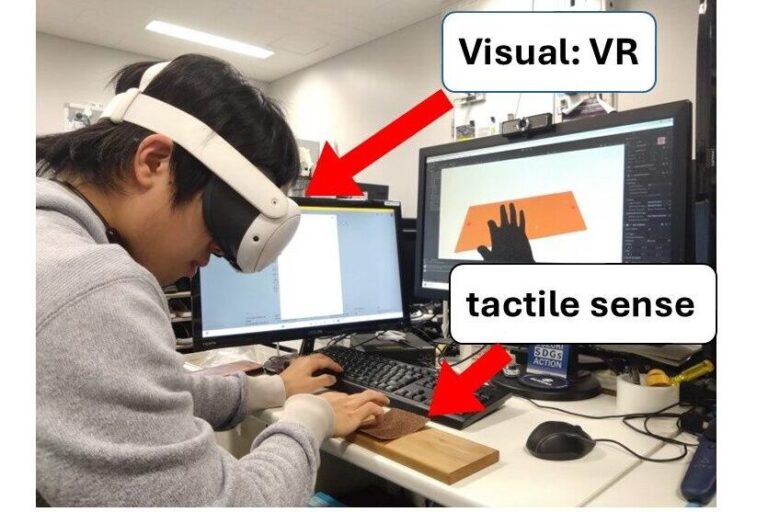
条件付け学習を用いた視覚刺激による触覚想起がVR内の探索行動に与える影響の検証
触覚情報はVR操作や技能訓練において重要な役割を果たすが, 従来の触覚提示はハプティクスデバイスに依存しており, 装置コストや装着負担が課題である. また, 視覚刺激のみで触覚感覚を補完する研究は存在するものの, 多くは […]-
crlweb
-
-
 人間センシング
人間センシング
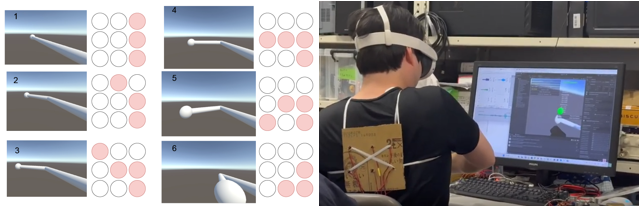
筋電操作型追加四肢の操作熟達に向けたフィードバック法の提案
高齢化社会の進展や労働環境の多様化に伴い、人間の身体能力を拡張する追加四肢技術への需要が高まっている。特に筋電信号(EMG)を用いた制御方式は非侵襲的で柔軟な操作が可能である一方で、新たな運動スキルの習得が必要で、効率的 […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
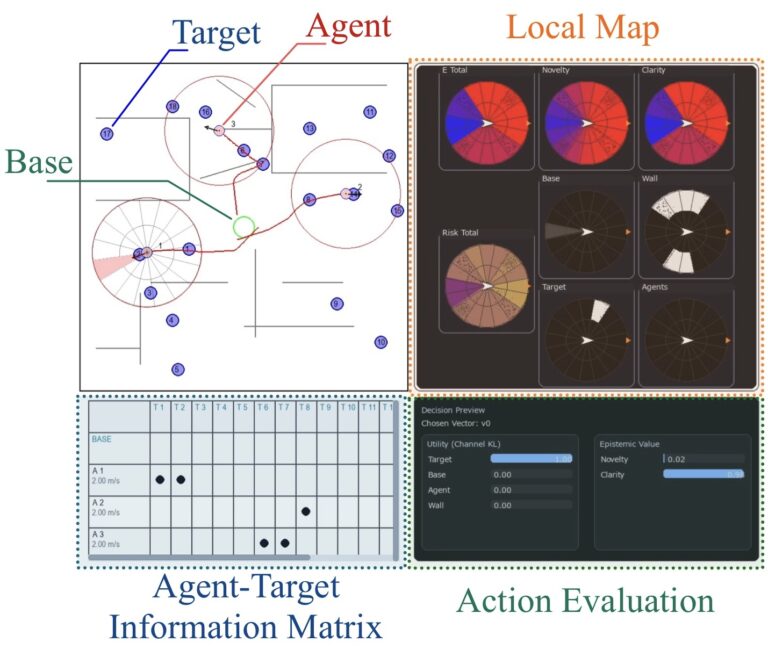
マルチホップ通信を活用した局所適応型マルチエージェント情報伝達の効率化
概要 多数ロボット(マルチエージェントシステム)は冗長性と分散性によりロバストに振る舞えるため,災害現場・屋内探索・海底探査など実環境での応用が期待される。 一方で実環境では,通信インフラの崩壊,遮蔽,反射,混雑などによ […]-
crlweb
-
-
 人間センシング
人間センシング
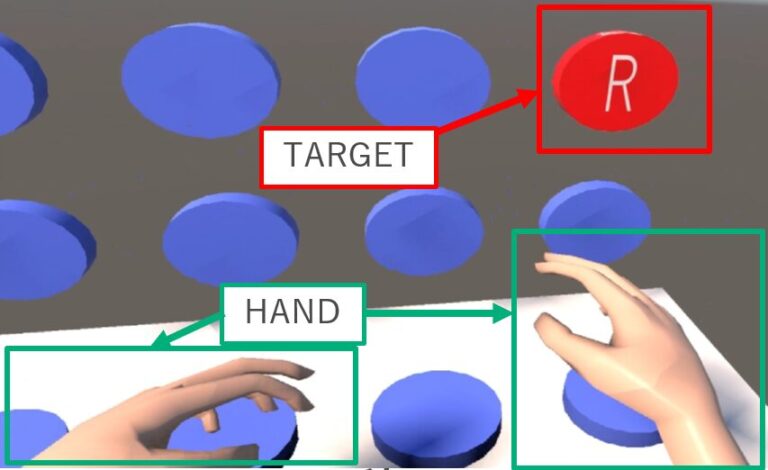
視覚探索タスクのおける不透明度変調を用いた視覚キューの有効性検証
誘導は,ユーザの注意を過度に奪い没入感を低下させる課題がある.また,輝度変調を用いた非明示的な手法は没入感を維持できるものの,アイトラッキングによる認知負荷推定において「対光反射」によるノイズを誘発し,正確な瞳孔計測を妨 […]-
crlweb
-
-
活動報告
SICE SI 2025 に参加
本研究室の学生らが、広島国際会議場で行われた第26回計測自動制御学会システムインテグレーション部門講演会(SI2025)に参加し、9件の研究発表を行いました。皆様から頂いたご意見や知見をもとに、今後の研究活動に活かしてい […]-
crlweb
-
-
 活動報告
活動報告
日本機械学会 2025年度年次大会 に参加
本研究室の学生らが、北海道大学で行われた日本機械学会 2025年度 年次大会(JSME)に参加し、3件の研究発表を行いました。皆様から頂いたご意見や知見をもとに、今後の研究活動に活かしていきたい所存です。-
crlweb
-
-
活動報告
日本機械学会 ロボティクス・メカトロニクス部門 ロボティクス・メカトロニクス 講演会 2025 in Yamagata に参加
本研究室の学生らが、山形県で行われた日本機械学会情報 ロボティクス・メカトロニクス部門 ロボティクス・メカトロニクス 講演会に参加し、14件の研究発表を行いました。皆様から頂いたご意見や知見をもとに、今後の研究活動に活か […]-
crlweb
-