概要
現在,多種多様のドライビングアシスト機構が考案され実用化されている.これらは人間の動きを用いて予測するシステムは少なく,車両や周辺状況を触覚や視覚や聴覚を用いてドライバーへ認知・アシストするものが多い.本来は直接ドライバーの状態を測定し意図を汲み取り,アシストを行う様なシステムが望ましい.
本研究ではステアリングを握る握力を利用しドライバーの操作を予測することで,ステアリングアシストに利用する手法を提案する.そしてステアリング操作の際の負担軽減・車両安定化・協調性の向上を目指し,握力を用いた操作予測の有用性を検証する.
提案手法
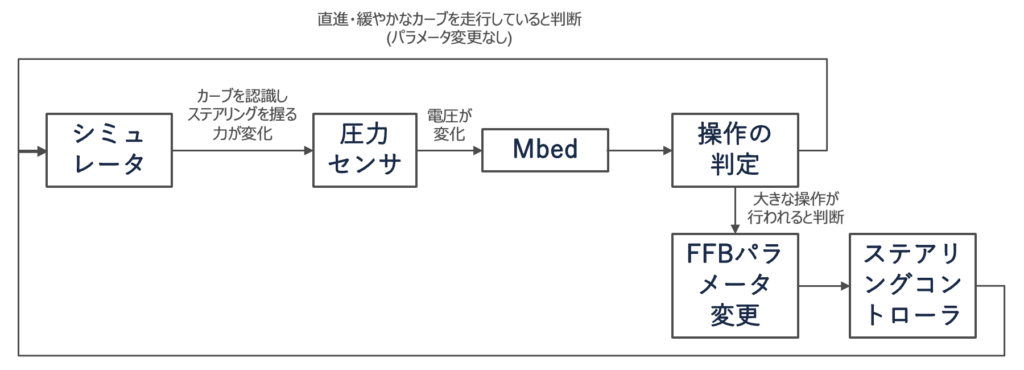
ステアリングを握る圧力を利用しステアリングアシスト量を変化させるシステムを提案する.
パワーステアリングはステアリングを操舵したときにドライバーが容易に車体をコントロールできる様にするための装置である.ステアリングを操舵するときの重さや戻りを変化させることが油圧アクチュエータまたは電動モータによって可能である.これを利用し障害物回避の際のステアリングフィールを変更する.これにより,車両安定化と協調アシストの向上を図る.
実験
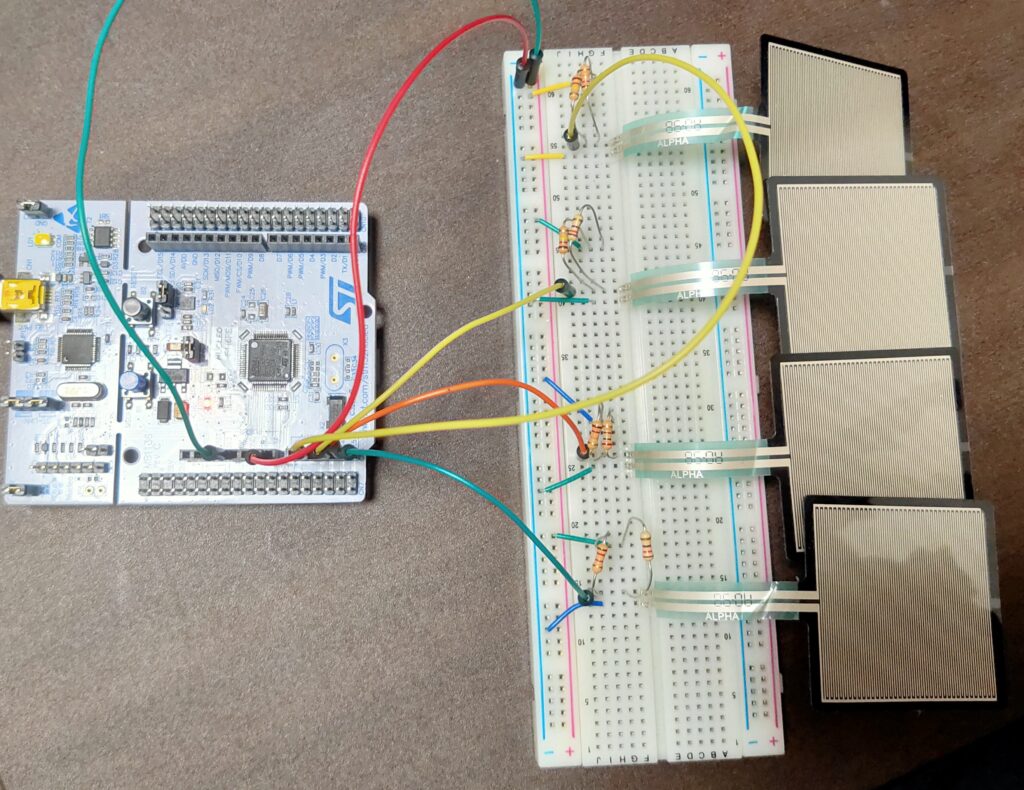
ドライブシミュレータとステアリングコントローラ・圧力センサを用いてシステムを構築した.
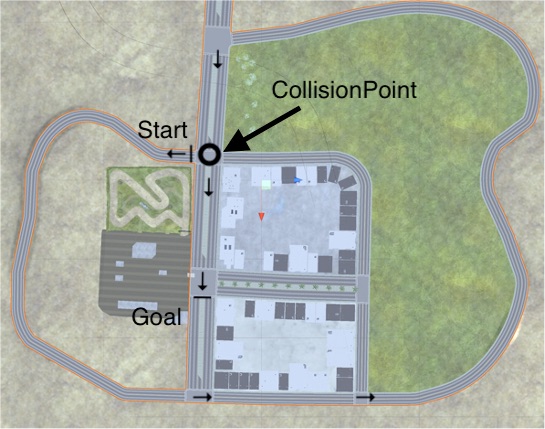
走行コースは付属のコースを再構築したもので,カーブや坂道や交差点が含まれている複合コースを設定し,現実世界で存在するようなものとした.衝突ポイントは北から2番目の交差点で第1通行帯側に障害物が出現するものとした.実験では障害物を認知したのち,第2通行帯からはみ出さないように回避し第1通行帯にもどるようなものとした.
また,ステアリングコントローラはフォースフィードバック (FFB) 機能付きのものを使用することでパワーステアリングの特性の変更が可能とした.特性の変更は,ドライバーソフトウェアによる操作で行うことが可能である.
実験は4回運転を行う(FFBパラメータ変化あり2回,変化なし2回).運転に慣れてもらうため,事前に10分マップ内を自由走行してもらう事とした.衝突回避時にFFBパラメータのオーバーオールストレングスゲイン (ステアリングを操作する重さ)を30%から60%へ変更を行い,オートセンタを最大とし,必ず中立の位置に戻るように設定する.
2人1 組で実験を行い,被験者とパラメータ操作で分担して操作する.2台モニターを用意し,シミュレータ実行用とパラメータ変更用で画面を分割して行う.


結果
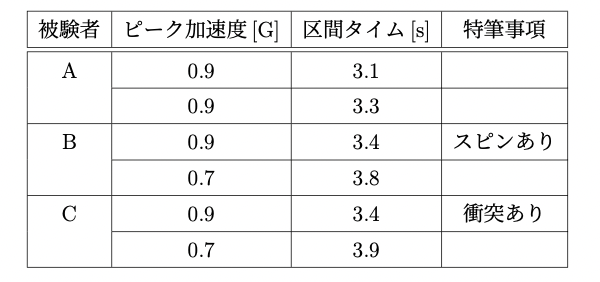
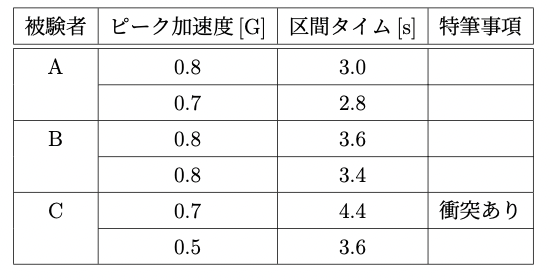
FFBパラメータ変更なしの場合,運転に慣れている人は正しく回避でき,慣れていない人は大きくハンドルを操舵してしまったり操舵遅れのために車両が不安定になり衝突またはスピンといった状態になってしまっている.
FFB パラメータ変更ありの場合.多くの実験でピーク加速度及び区間タイムが減少していることがわかる.これは衝突回避の際のステアリングの重さが重くなったため,大きく操舵することがなくなったためであると考えられえる.しかし初心運転者の場合,ステアリングフィールの変化によってドライバーが驚いてしまい,適切な操舵ができなくなり衝突してしまったと考えられる.
また,加速度はFFBパラメータ変更後が小さくなっており,車両の状態が急激に変化していないことから,タイヤのグリップに余裕があり車両が安定していることがわかる.
今後の願望
今後は,ステアリングコントローラのFFBパラメータ変更を自動化させることや,より現実的で複雑なコース設定,衝突回避以外の走行時におけるFFBパラメータの検証を行っていきたい.また,実験人数を増やし適切なパラメータの検証やドライバーの行動を予測できるモデ ルを作成し,人間の意図を読み取ることができるシステムを構築する.
そして本研究で握力から人間の意図を汲み取るという点において有用性があると示唆された.握力から意図を汲み取ることは他の分野において協調アシストの向上に利用できる可能性があるため,さらなる研究に応用していきたい.