-
 ロボット間協調
ロボット間協調
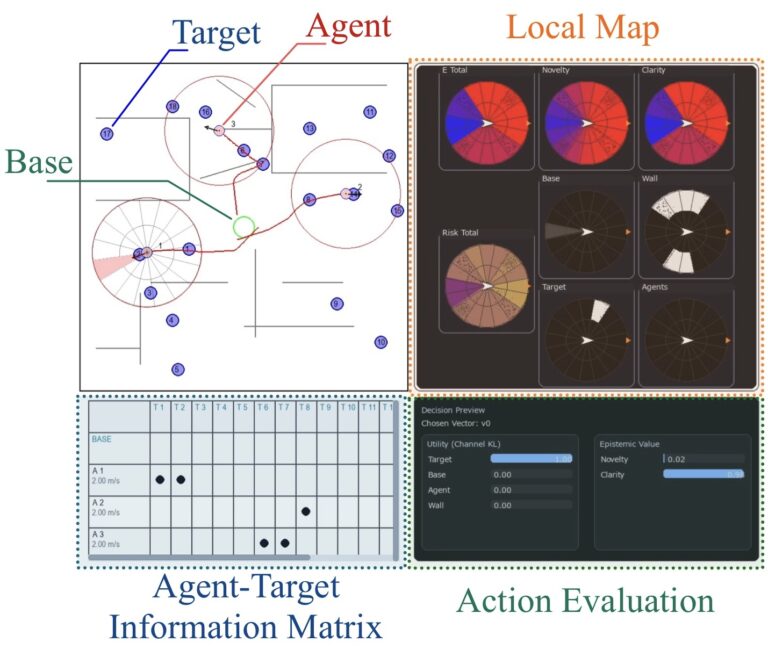
自律分散型マルチエージェントシステムによる不規則的状況変化への対応検証
背景 近年,災害現場の探索や宇宙空間での活動など,事前の環境予測が困難な領域において,各機の問題に対する頑健さや,システム規模変更の容易さ,柔軟なシステムの変化による環境変化への適応という特性から,自律分散型マルチエージ […]-
 crlweb
crlweb
-
-
 ロボット間協調
ロボット間協調
マルチホップ通信を活用した局所適応型マルチエージェント情報伝達の効率化
概要 多数ロボット(マルチエージェントシステム)は冗長性と分散性によりロバストに振る舞えるため,災害現場・屋内探索・海底探査など実環境での応用が期待される。 一方で実環境では,通信インフラの崩壊,遮蔽,反射,混雑などによ […]-
crlweb
-
-
 ロボット間協調
ロボット間協調
模倣と多様性維持による社会的協調理論
五十嵐 洋(東京電機大学) キーワード:マルチエージェント,模倣,多様性,社会的協調アルゴリズム-
crlweb
-