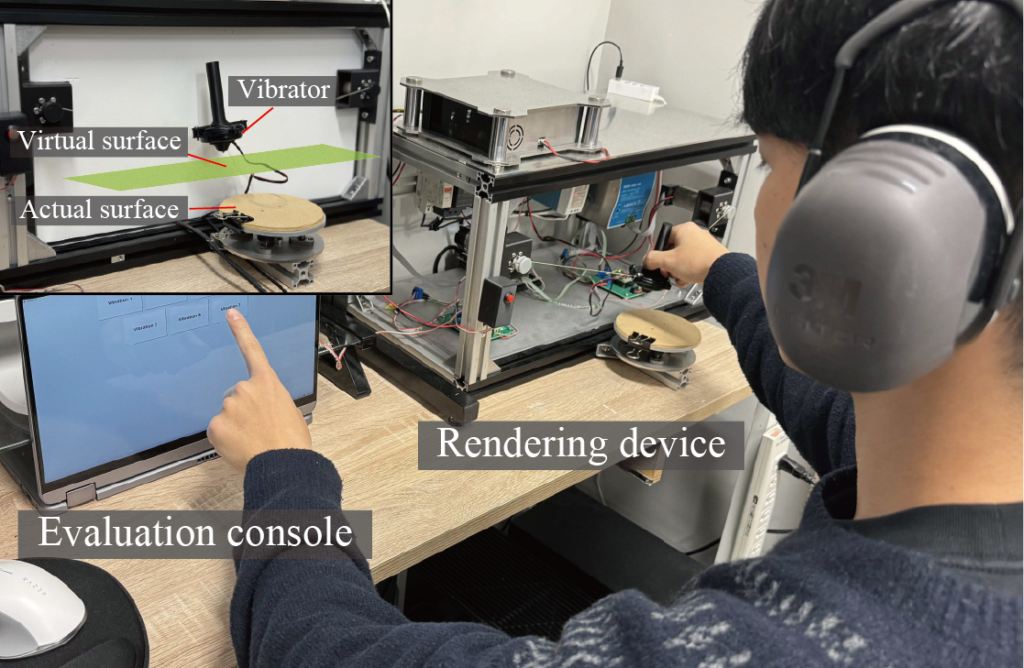
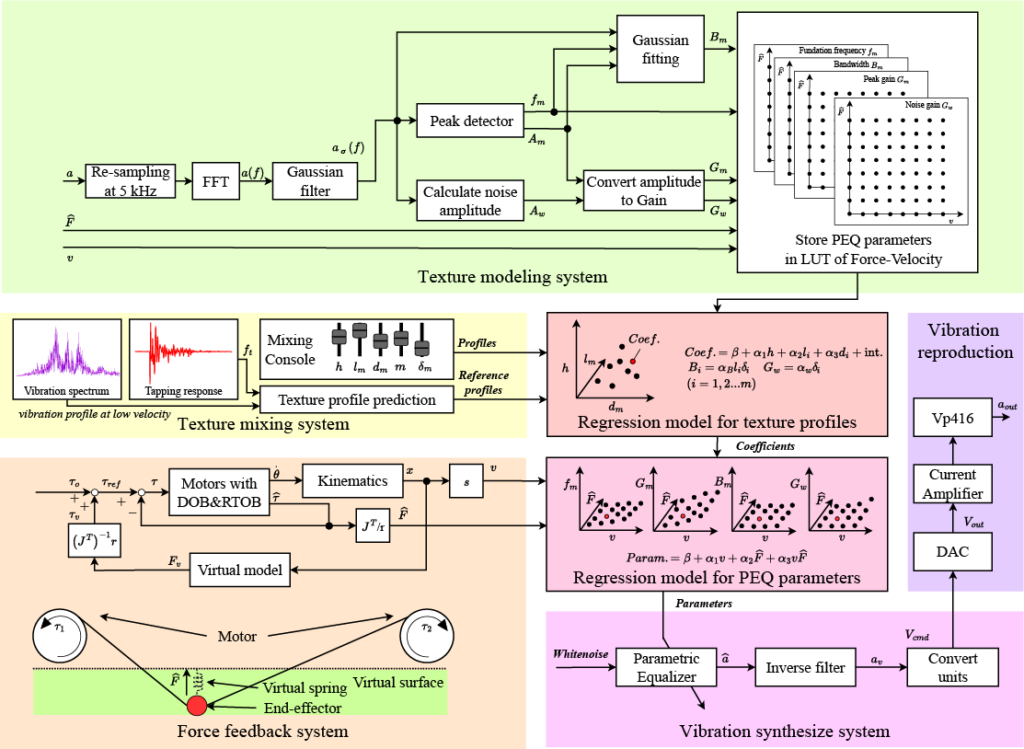
このシステムは、ユーザーがコンソールで操作するテクスチャ特性に応じた振動をリアルタイムでフィードバックすることができる装置です。このシステムは力覚提示システム、ミキシング・コンソール、振動合成システム、そして2つのロバスト回帰モデルで構成されています。測定装置で予め取得したなぞり速度と力、およびテクスチャごとの振動特性に基づき、最初のロバスト回帰モデルが適用されます。このモデルにより、各テクスチャの振動を再現できます。我々は振動特性(周波数、振幅、帯域幅、ノイズ量)を制御するためにパラメトリックイコライザ(PEQ)を使用しています。第一のロバスト回帰モデルはこれらの振動特性を出力します。これらの値はテクスチャの特性(硬度や溝の間隔、深さなど)に応じて変わるため、第二のロバスト回帰モデルは第一のモデルの回帰係数と物理特性との関係を示します。この2つのモデルにより、ユーザーがテクスチャ特性を操作するだけで、対応する設定が即座に行われます。
ユーザーがコンソールで設定したモデルに基づき、力覚提示装置から取得される力と速度の情報が入力されると、対応する振動特性がモデルから出力されます。出力された振動特性に基づいて、PEQが構築され、ホワイトノイズが変調されます。この変調された振動は、振動子の特性に合わせて逆フィルタで校正され、アンプを通じて振動子に入力されます。振動子はユーザーが操作する力覚提示装置に取り付けられており、自分が設定したテクスチャの振動をその場で確認することが可能です。
この研究の代表者
博士3年 戸塚 圭亮
2016年に東京電機大学に入学後2020年に卒業、修士課程に進学し、2022年に修了。2022年に修士課程後期に進学し、現在は博士3年。
2022年春から2025年春まで、東京電機大学にて特任助手に任命。
研究領域: ハプティクス、バーチャルリアリティ、ロボティクス
趣味: 釣り、料理、映画、アニメ鑑賞
代表的な業績
- K. Tozuka and H. Igarashi, “A Simplified Texture Modeling Using a Physical and Perceptual Rule-Based Approach,” in IEEE Access, vol. 12, pp. 59868-59879, 2024.
- K. Tozuka and H. Igarashi, “Effects on Perception when Removing One Frequency Component from Two Harmonic Vibrations,” 2023 IEEE World Haptics Conference (WHC), Delft, Netherlands, 2023, pp. 425-431.