-
 研究テーマ
研究テーマ
発声における音程コントロールの熟達支援
歌唱力を向上,もしくは逆に音痴の改善には何をする必要があるのでしょうか.音痴である原因としては,タイミングや声の音色,音程と様々な要因が考えれます.そして歌唱力の向上のためには,それぞれの要因についてトレーニングを行い改 […]-
 crlweb
crlweb
-
-
研究テーマ
虚偽心拍フィードバックを用いたストレス制御によるタスクのパフォーマンス向上
現代社会はストレス社会と呼ばれるほど,ストレスにさらされています.ヤーキーズ・ドットソンの法則の法則によると,高いストレス,低いストレスはパフォーマンスの低下を招き,適切なストレスのときに良いパフォーマンスを発揮できます […]-
crlweb
-
-
研究テーマ
筋シナジー解析を用いたFESによる熟達支援
事故や病気などにより失った関節運動の再建などのリハビリテーション分野や運動学習では療法士や、教示者が口伝、徒手で指示をしています。しかし、運動の感覚は人によって異なり、教示者の意図する動作を学習者に正確に伝えることは困難 […]-
crlweb
-
-
 研究テーマ
研究テーマ
注意力を利用したVR酔いを軽減するフレームワークの提案
バーチャルリアリティ(VR)の普及に伴い,VRを利用した応用研究やゲーム,アトラクションが生まれました.しかし,VRを使用したことで乗り物酔いに似た症状が発生してしまい,ゲーム等の継続が困難になってしまうという問題が起き […]-
crlweb
-
-
研究テーマ
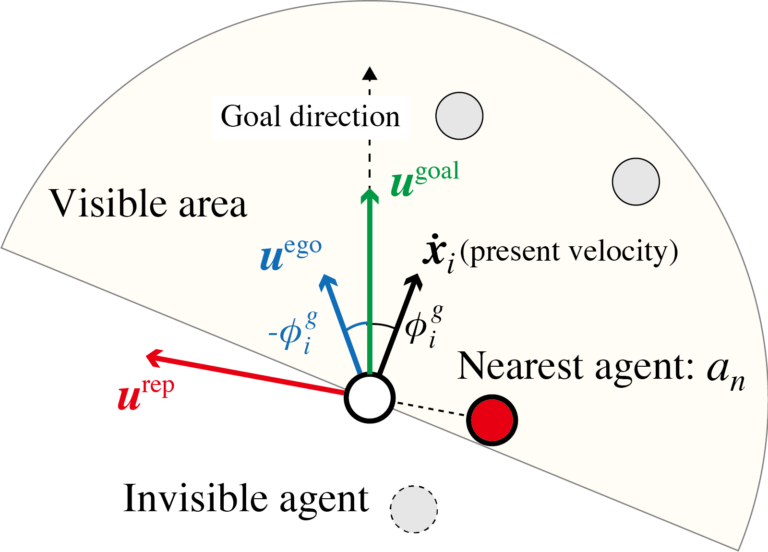
無意識下でのリズム誘導による協働作業でのストレス抑制
協働ロボットの普及によりロボットとの作業による作業主体感の欠如によってストレスの増加が問題となっている.より快適な作業環境を目指すため同期現象という他者と動きを合わせる現象が人-ロボット間で成立することに着目し,人は提示 […]-
crlweb
-
-
 研究テーマ
研究テーマ
模倣と多様性維持による社会的協調理論
五十嵐 洋(東京電機大学) キーワード:マルチエージェント,模倣,多様性,社会的協調アルゴリズム-
crlweb
-
-
 研究テーマ
研究テーマ
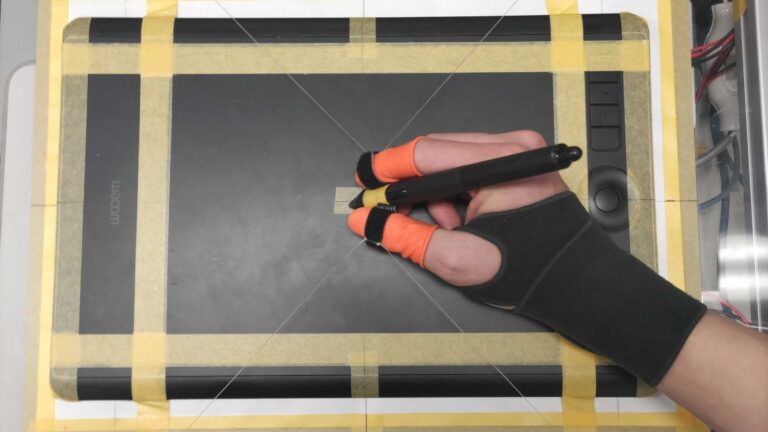
指先への力覚提示による道具操作の熟達支援
ヒトは、指と道具、道具と対象物との間の力のバランスを考慮することで、道具を巧みに操作します。これらの動作は繊細な力加減を必要とするため、個人差が生じやすく、動作の熟達には支援が求められます。これまでに提案されてきた熟達支 […]-
crlweb
-
-
 研究テーマ
研究テーマ
教示手法解析のための学習者モデルの提案による人間ーロボット間教示
本研究室では人間の先生から人間の生徒へ教える「教示」という研究を行っています.ロボットの先生が人間の生徒へ教える研究は盛んに行われていますが,手術やロボットに難しい作業等人間の先生が必要な場面が多く存在します.しかし,人 […]-
crlweb
-
-
 研究テーマ
研究テーマ
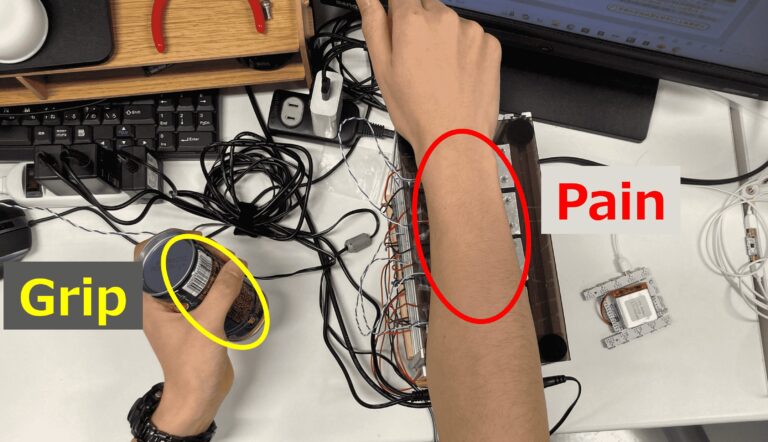
手繋ぎ動作における痛みの緩和効果の調査
握り動作における痛みの緩和効果の調査 握り動作による痛みの緩和手法は看護においても実践されており,薬を用いない手法として注目されています.しかし,昨今の医療業界の人手不足からも患者の手を握り続けることは難しいのが現状です […]-
crlweb
-
-
 研究テーマ
研究テーマ
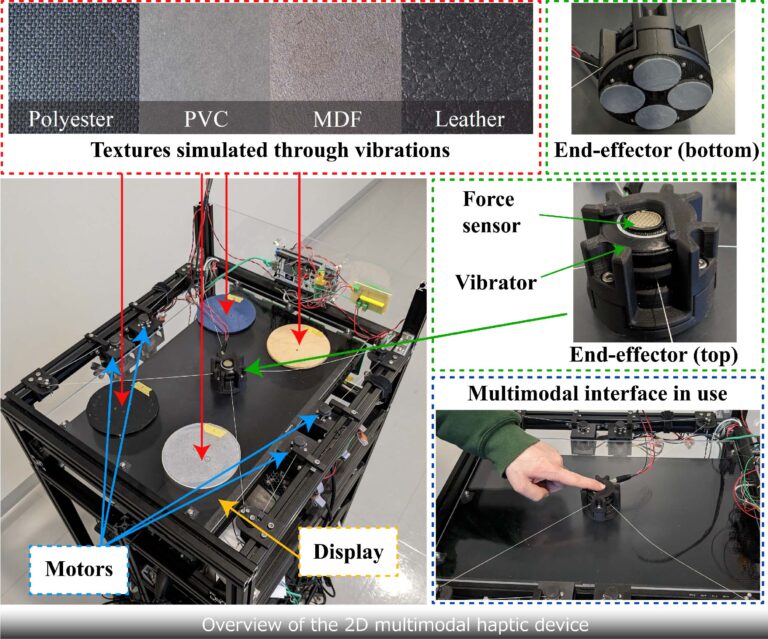
Development of a fully reconfigurable multimodal haptic cable-driven parallel robot
Overview of the project This project lead to the creation of two haptic cable-driven parallel robots (CDPR): a […]-
crlweb
-