近年,教育や開発など様々な場面で仮想環境の利用が注目されている.このような場面で直感的でスムーズな操作を実現するためには,触覚提示が重要となる.しかしながら多くの触覚提示デバイスは重量,体積が大きく,作業をするうえでの弊害となる.そこで本研究では軽量,小型で実装できる振動グローブに着目した.振動グローブを用いた先行研究は数多く提案されているが,多くが物体を把持する際の各指や手掌部での力の掛け具合やバランスを取るような把持方法を再現出来ていない.よって本研究では振動グローブを用いて,実際の把持による手の力分布を参考にした仮想環境での振動提示を提案する.これにより把持した物体の重心の偏りの感覚が知覚できるかの調査を行った.
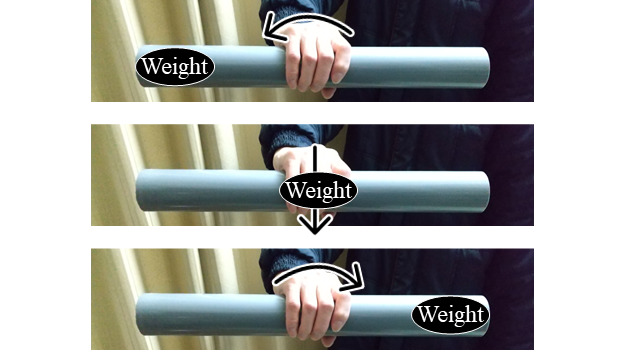
力分布の測定結果より重心に偏りのある棒を把持すると,指先や手掌部で力分布が変化していることを確認した.水平に把持した棒の左又は右に錘がある場合,錘とは反対側の中手骨頭を用いて棒を支えていた.そしてこの力分布を参考に,仮想環境で棒を把持させ振動提示を行ったところ,振動の強い部位側に重心があるように感じると判明した.そのため振動による重心の偏りの知覚は実際の力分布とは異なる可能性が示唆された.